Amaterska antenska merilnica
Matjaž Vidmar, S53MV
1. Nesrečne antene
Še dobro se spomnim, kako sem pred mnogimi leti kot srednješolec na informativnem dnevu prvič obiskal Fakulteto za Elektrotehniko v Ljubljani. Takrat sem verjetno videl notranjosti več laboratorijev kot kdajkoli kasneje. Od vseh laboratorijev se mi je najbolj zameril prav laboratorij za antene čisto na vrhu novejše zgradbe. Preveč računanja in preveč meritev za premalo pomemben rezultat? Takrat še nisem vedel, da bom končal prav v njemu in nazadnje postal celo njegov predstojnik...
Preveč računanja in preveč meritev je žal še danes slab izgovor za marsikaterega amaterja. Američani so pred mnogimi leti pometli vprašanje pod preprogo tako, da so v oglasih za antene v radioamaterskem časopisu QST prepovedali objavo decibelov dobitka, smernosti in drugih pomembnih lastnosti anten. Kar je težko, nerodno oziroma zamudno izmeriti, ne preverjam in ne morem odgovarjati za vsebino. Radioamaterjem so se pridružili izdelovalci telefonov, kjer je zunanji izgled daleč pomembnejši od lastnosti vgrajenih anten. Telefon mora biti predvsem pametnejši od lastnika, njegov radio je pa lahko popolnoma gluh in nem.
Velikost in obliko kril letala določajo strogi zakoni aerodinamike. Niti Red Bull zaenkrat še ne zna izdelati letala brez kril. Velikost in obliko radijske antene določajo strogi zakoni elektrodinamike. Računalniškim hekerjem je težko dopovedati, da integracija antene v mikročip ni možna. Načrtovanje anten zahteva poznavanje zahtevne matematike, kar med hekerji ni priljubljeno niti spoštovano. Meritev anten zahteva predvsem dosti prostora, česar trgovci z merilno opremo ne znajo prodajati.
Nepoznavanje anten se preslika v pripadajočo zakonodajo, ki strogo predpisuje, kaj sme sevati oddajnik v umetno breme in kaj sme loviti sprejemnik iz laboratorijskega signal generatorja. O tem, kako naj se isti oddajnik in sprejemnik obnašata takrat, ko sta priključena na resnične antene, predpisi največkrat molčijo. Sledi glavobol v praksi, ko po veljavnih predpisih ustrezna in brezhibna radijska oprema na vrhu hriba kar tako sama od sebe neha delati...
Kot študent sem imel priložnost spoznati oboje: profesor Jožko Budin nam je razlagal hudo teorijo anten, zagrizeni merilec Stanko Gajšek, inženir pri Iskra Elektrozveze, pa nam je pokazal, kako sploh pravilno izmeriti kakšno anteno. Prav slednjemu gre zahvala, da je teorija profesorjevih predavanj in številnih teoretskih knjig o antenah končno zaživela. Na prvi pogled nepomembne podrobnosti iz teorije omogočajo najrazličnejše meritve lastnosti anten.
Mislim, da je dosti lažje predavati teorijo na tablo kot pa prikazati resnično meritev v laboratoriju. Žal si danes marsikje pomagajo z računalniško simulacijo, kar je najbolj bedna od vseh možnih rešitev. Pri računalniški simulaciji pozabimo na teorijo in hkrati ne okusimo resničnega sveta meritev. Računalniška simulacija je lahko kvečjemu dopolnilo teorije in meritev, nikakor pa ne more nadomestiti niti teorije niti meritev. Koliko lahko sploh zaupamo simulaciji brez meritev in brez teorije fizikalnega ozadja naloge?
Čez nekaj let sem kot asistent prevzel vaje pri predmetu o antenah. Na profesorjevo željo sem skušal pripraviti tudi različne laboratorijske poskuse za študente. Resnične meritve anten so si študentje lahko ogledali v živo na strehi, kjer je Stanko Gajšek pogosto meril antene za različne naročnike, od televizije do vojske. Žal je bilo z razpadom Jugoslavije in pripadajočih podjetij takšnih meritev čedalje manj.
Za študente je bilo treba pripraviti nekaj, kar lahko sami postavijo in izmerijo v laboratoriju. Študentje naj ne bi čakali na čedalje redkejše meritve na strehi naše fakultete niti na lepo vreme, kar je za takšne meritve nujen predpogoj. V omejenem prostoru je nujno uporabiti dovolj kratke valovne dolžine. Najbolj nadležne odboje se da zadušiti že z nekaj kosi črne plastične mikrovalovne absorpcijske pene, če si cele gluhe sobe ne moremo privoščiti.
Laboratorij
je imel nekaj uporabnih merilnih oddajnikov in sprejemnikov ter
številne delujoče prototipe anten za frekvence okoli
![]() ,
to se pravi za sobne meritve dovolj majhno valovno dolžino v
velikostnem razredu
,
to se pravi za sobne meritve dovolj majhno valovno dolžino v
velikostnem razredu
![]() .
Manjkal nam je edino primerno majhen vrtiljak, ki bi zavrtel merjenec
pri meritvi smernega diagrama. Profi pošast proizvajalca
Scientific Atlanta na strehi laboratorija je sicer izredno močen
in natančen vrtiljak, ampak daleč prevelik, da bi ga lahko
vsakodnevno prenašali po laboratoriju.
.
Manjkal nam je edino primerno majhen vrtiljak, ki bi zavrtel merjenec
pri meritvi smernega diagrama. Profi pošast proizvajalca
Scientific Atlanta na strehi laboratorija je sicer izredno močen
in natančen vrtiljak, ampak daleč prevelik, da bi ga lahko
vsakodnevno prenašali po laboratoriju.
Radioamaterski antenski "rotator" ni niti poceni niti dovolj natančen za meritve anten. Z laborantom Janezom sva na razprodaji propadle Iskre Delte pokupila vse elektromotorje: asinhronske, s krtačkami in koračne. Koračni so izgledali dovolj močni, da na njihovo gred neposredno pritrdimo naše merjence. Z mikroprocesorjem Z80CPU sem takrat izdelal preprost krmilnik, ki naj bi krmilil koračni motor.
Običajni koračni motor naredi en poln obrat v 200 korakih. Z uporabo polovičnih korakov doseže celo 400 korakov v enem obratu, kar je za meritve preprostih anten preko glave zadosti. Prvi poskus s koračnim motorjem je bil prava polomija. Po vsakem skoku koračnega motorja se je še tako majhna antena začela zibati na gredi motorja. Izmerjeni smerni diagram je bil nažagan celo na počasnem analognem risalniku (plotterju), torej popolnoma neuporaben.
Skušal
sem najti rešitev, da ne zavržem vloženega dela v izdelavo
mehanike malega vrtiljaka in pripadajočega krmilnika. Koračni
motor se načeloma da krmiliti tudi popolnoma zvezno z natančnim
nastavljanjem tokov v navitjih. Sodobni CNC strokovnjaki bi temu
rekli "mikrostep kontroler". Z izdelanim krmilnikom sem
lahko napravil kvečjemu pulzno-širinsko krmiljenje tokov
v navitjih. Pri frekvenci ure komaj
![]() je ubogi Z80CPU zmogel softverski PWM s frekvenco ponavljanja samo
nekaj kHz, da je koračni motor med vrtenjem glasno piskal.
je ubogi Z80CPU zmogel softverski PWM s frekvenco ponavljanja samo
nekaj kHz, da je koračni motor med vrtenjem glasno piskal.
Italijanski pregovor pravi, da so začasne rešitve tiste, ki trajajo najdlje. Moj počasni PWM je pridno mijavkal skoraj četrt stoletja pri laboratorijskih vajah iz anten! Medtem se je marsikaj spremenilo. Delo v antenski merilnici na strehi našega laboratorija je povsem zamrlo. Mehankarija Sicentific Atlanta se sicer kljub rji vztrajno upira zobu časa. Manj uspešno kljubujejo zobu časa merilni inštrumenti in računalniki Hewlett-Packard z mikroprocesorjem MC68020, ki so obdelali in izrisali smerne diagrame merjencev.
Tudi številni pripomočki za laboratorijske vaje iz anten so podlegli zobu časa. Merilne inštrumente mogoče še uspemo popravljati. Za analogne risalnike (plotterje) se že vrsto let ne dobi več pripadajočih svinčnikov. Pocrkali so tudi napajalniki Iskra Delta, ki smo jih uporabili v doma izdelanih vrtiljakih. Laboratorijske vaje so se izrodile v mučno prepisovanje številk za študente in v brezupno oživljanje starajoče opreme za asistenta in laboranta.
Obnove laboratorijskih vaj iz anten sem se moral lotiti sam. Popraviti in posodobiti doma izdelane vrtiljake s koračnimi motorji. Prenesti vsa dolgočasna in duhamorna opravila na PC računalnike vključno z risanjem izmerjenih smernih diagramov. Uporabiti čim več doma izdelanih merilnih inštrumentov in pripomočkov, ker postaja profesionalna merilna oprema nedostopno draga celo za fakulteto in se povrhu pogosto kvari.
Končno, zakaj si istih meritev ne bi mogel privoščiti doma za moje radioamaterske antene? Jasno ne v zaprti sobi, pač pa odprtem, najboljše sredi trave, kjer je malo motečih odbojev. Za razliko od profesionalnih inštrumentov, ki potrebujejo omrežno napajanje 230V~, imajo doma izdelani pripomočki napajanje 12V=, torej jih lahko napajam z baterijami (akumulatorji) kjerkoli na prostem.
Koračni motor sicer ne more vrteti zelo velikih anten. Lahko pa zavrtim samo žarilec, da pomerim njegov smerni diagram in določim izkoristek osvetlitve velikega paraboličnega zrcala. Številne uporabne antenske meritve so torej povsem izvedljive s ceneno in dostopno merilno tehniko. To je tudi cilj tega članka: kako sestaviti preprosto ampak uporabo amatersko antensko merilnico.
2. Smerni diagram
Vsako
anteno opisujeta dva pomembna podatka: smerni diagram
![]() in sevalni izkoristek
in sevalni izkoristek
![]() .
Smerni diagram
.
Smerni diagram
![]() pove, v katero smer antena izseva moč, ki jo dovaja oddajnik
oziroma iz katere smeri prihaja moč, ki jo antena daje
sprejemniku. Sevalni izkoristek
pove, v katero smer antena izseva moč, ki jo dovaja oddajnik
oziroma iz katere smeri prihaja moč, ki jo antena daje
sprejemniku. Sevalni izkoristek
![]() pove, kolikšen delež moči oddajnika se koristno pretvori
v valovanje v praznem prostoru oziroma kolikšen delež prispele
moči iz praznega prostora konča v sprejemniku.
pove, kolikšen delež moči oddajnika se koristno pretvori
v valovanje v praznem prostoru oziroma kolikšen delež prispele
moči iz praznega prostora konča v sprejemniku.
Ko
je sevalni izkoristek
![]() manjši od enote, se preostala moč pretvori v toploto v
sami anteni oziroma se odbije nazaj proti viru. Ožji pojem je
odbojnost
manjši od enote, se preostala moč pretvori v toploto v
sami anteni oziroma se odbije nazaj proti viru. Ožji pojem je
odbojnost
![]() ,
ki pri dogovorjeni karakteristični impedanci
,
ki pri dogovorjeni karakteristični impedanci
![]() predstavlja impedanco antene
predstavlja impedanco antene
![]() oziroma razmerje stojnega vala
oziroma razmerje stojnega vala
![]() na prenosnem vodu med radijsko postajo in anteno. Pri tem sta
na prenosnem vodu med radijsko postajo in anteno. Pri tem sta
![]() in
in
![]() kompleksni števili, razmerje stojnega vala
kompleksni števili, razmerje stojnega vala
![]() pa je realno število. Ker je v nekaterih deželah prepovedana
uporaba kompleksnih števil, Talibani uporabljajo samo razmerje
stojnega vala in ga pišejo kot razmerje
pa je realno število. Ker je v nekaterih deželah prepovedana
uporaba kompleksnih števil, Talibani uporabljajo samo razmerje
stojnega vala in ga pišejo kot razmerje
![]() .
.
Odbojnost
![]() ,
impedanca
,
impedanca
![]() in razmerje stojnega vala
in razmerje stojnega vala
![]() sami po sebi ne zagotavljajo dobrega sevalnega izkoristka
sami po sebi ne zagotavljajo dobrega sevalnega izkoristka
![]() antene, saj se znaten del prispele moči lahko v anteni pretvori
tudi v toploto. Sloviti veliki Teslov transformator je imel izredno
slab sevalni izkoristek
antene, saj se znaten del prispele moči lahko v anteni pretvori
tudi v toploto. Sloviti veliki Teslov transformator je imel izredno
slab sevalni izkoristek
![]() ,
kar pomeni, da je 99.99% prispele električne moči pretvoril
v toploto in nesmiselne iskre. Niti sodobni "pametni"
telefoni niso kaj dosti boljši.
,
kar pomeni, da je 99.99% prispele električne moči pretvoril
v toploto in nesmiselne iskre. Niti sodobni "pametni"
telefoni niso kaj dosti boljši.
Trgovci
z antenami znajo kvečjemu izmeriti razmerje stojnega vala
![]() .
Predlagam, da svojim zvestim kupcem kot najboljšo možno anteno
ponudijo upor
.
Predlagam, da svojim zvestim kupcem kot najboljšo možno anteno
ponudijo upor
![]() .
Takšna antena ima zagotovljeno razmerje stojnega vala
.
Takšna antena ima zagotovljeno razmerje stojnega vala
![]() (zapisano v obliki za Talibane) in povrhu ne seva škodljivih
motenj drugim uporabnikom radijskega spektra. Sevalni izkoristek
(zapisano v obliki za Talibane) in povrhu ne seva škodljivih
motenj drugim uporabnikom radijskega spektra. Sevalni izkoristek
![]() enak nič in smerni diagram
enak nič in smerni diagram
![]() enak nič sta za zveste kupce takšnih anten povsem
sprejemljiva, saj večinoma ne vejo, kaj ti pojmi pomenijo.
enak nič sta za zveste kupce takšnih anten povsem
sprejemljiva, saj večinoma ne vejo, kaj ti pojmi pomenijo.
Z
malo razumevanja se da narediti dosti bolj učinkovite antene kot
Nikola Tesla, pametni telefon ali upor
![]() .
Sevalni izkoristek vsake smiselne antene zagotovo presega
.
Sevalni izkoristek vsake smiselne antene zagotovo presega
![]() .
Kljub dobremu načrtovanju huda neznanka ostaja: kam antena seva,
torej kakšen je njen smerni diagram
.
Kljub dobremu načrtovanju huda neznanka ostaja: kam antena seva,
torej kakšen je njen smerni diagram
![]() Slednjega ni lahko določiti niti pravilno izmeriti. V smernem
diagramu se lahko skrivajo prikrite napake načrtovanja antene.
Slednjega ni lahko določiti niti pravilno izmeriti. V smernem
diagramu se lahko skrivajo prikrite napake načrtovanja antene.
Pri
smernem diagramu je treba najprej določiti, kako ga sploh
zapišemo. Ker v smernem diagramu nastopajo koti, moramo
najprej izbrati koordinatni sistem. Smerni diagram
![]() običajno zapišemo v krogelnem koordinatnem sistemu, kjer
je
običajno zapišemo v krogelnem koordinatnem sistemu, kjer
je
![]() zemljepisna dolžina. Namesto zemljepisne širine uporabljamo
polarno razdaljo
zemljepisna dolžina. Namesto zemljepisne širine uporabljamo
polarno razdaljo
![]() :
:
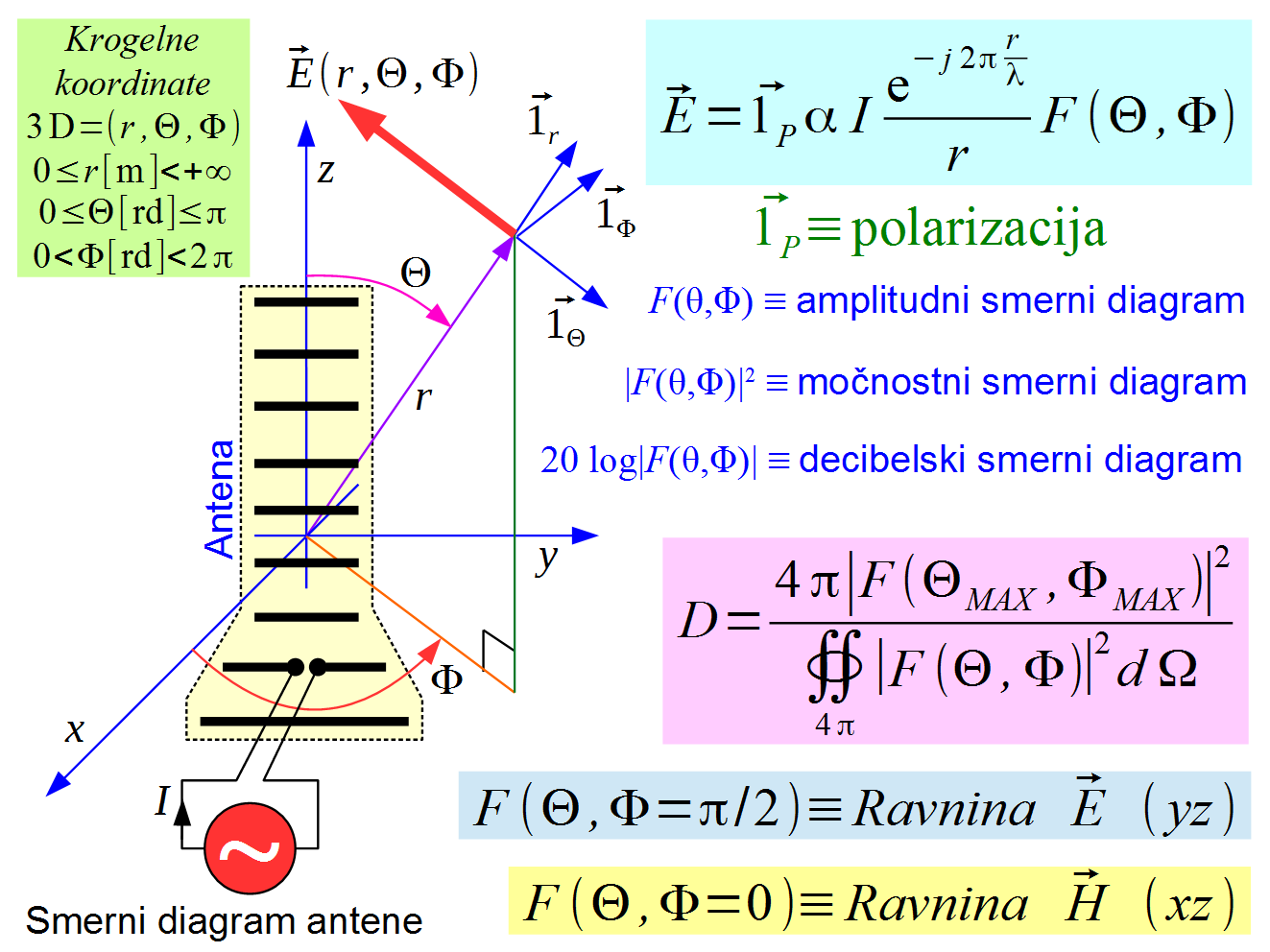
Anteno
postavimo v koordinatno izhodišče. Sevano električno
polje antene
![]() je vektorska funkcija vseh treh koordinat: oddaljenosti od izhodišča
je vektorska funkcija vseh treh koordinat: oddaljenosti od izhodišča
![]() ,
polarne razdalje
,
polarne razdalje
![]() in zemljepisne dolžine
in zemljepisne dolžine
![]() .
Elektromagnetno valovanje je prečno valovanje: polarizacijo
sevanega električnega polja opisuje smerni vektor
.
Elektromagnetno valovanje je prečno valovanje: polarizacijo
sevanega električnega polja opisuje smerni vektor
![]() .
Električno polje je sorazmerno amplitudi in fazi toka izvora
.
Električno polje je sorazmerno amplitudi in fazi toka izvora
![]() ,
ki vzbuja anteno.
,
ki vzbuja anteno.
Pri
dovolj veliki razdalji
![]() je odvisnost od
je odvisnost od
![]() za vse antene enaka. Amplituda polja upada kot
za vse antene enaka. Amplituda polja upada kot
![]() obratno sorazmerno razdalji. Kompleksna eksponentna funkcija
obratno sorazmerno razdalji. Kompleksna eksponentna funkcija
![]() opisuje zakasnitev faze zaradi potovanja valovanja s hitrostjo
svetlobe skozi prazen prostor. Če nam meritev daje drugačno
odvisnost od razdalje, to preprosto pomeni, da merimo preblizu. Žal
Nikola Tesla tega ni vedel...
opisuje zakasnitev faze zaradi potovanja valovanja s hitrostjo
svetlobe skozi prazen prostor. Če nam meritev daje drugačno
odvisnost od razdalje, to preprosto pomeni, da merimo preblizu. Žal
Nikola Tesla tega ni vedel...
Načrtovalcu
antene predstavlja največji izziv smerni diagram antene
![]() .
S preprostimi besedami slednji pomeni, kam naj antena seva in kam naj
antena NE seva.
.
S preprostimi besedami slednji pomeni, kam naj antena seva in kam naj
antena NE seva.
![]() imenujemo tudi amplitudni smerni diagram, čeprav je to
kompleksna funkcija, ki opisuje spreminjanje amplitude in faze polja
v odvisnosti od smeri
imenujemo tudi amplitudni smerni diagram, čeprav je to
kompleksna funkcija, ki opisuje spreminjanje amplitude in faze polja
v odvisnosti od smeri
![]() in
in
![]() .
.
Pogosto
zasledimo tudi drugačne oblike zapisa smernega diagrama.
Močnostni smerni diagram
![]() je enak kvadratu absolutne vrednosti amplitudnega smernega diagrama
in opisuje odvisnost gostote pretoka sevanje moči od smeri
je enak kvadratu absolutne vrednosti amplitudnega smernega diagrama
in opisuje odvisnost gostote pretoka sevanje moči od smeri
![]() in
in
![]() .
V logaritemskih merskih enotah zapišemo smerni diagram v
decibelih kot
.
V logaritemskih merskih enotah zapišemo smerni diagram v
decibelih kot
![]() .
Smerni diagram je lahko normiran na enoto ali
.
Smerni diagram je lahko normiran na enoto ali
![]() v smeri največjega sevanja, vendar to ni nujno potrebno.
v smeri največjega sevanja, vendar to ni nujno potrebno.
Ne
glede na obliko zapisa je smerni diagram antene funkcija dveh
spremenljivk, ki je ni lahko narisati, kaj šele na ta način
primerjati različne antene med sabo. Od številnih
lastnosti antene nas najbolj zanima smernost
![]() (angleško: directivity). Smernost je neimenovano razmerje, ki
nam pove, kolikokrat višjo gostoto moči seva antena v
željeni smeri v primerjavi s popolnoma neusmerjeno (izotropno) anteno
pri enaki (nespremenjeni) skupni izsevani moči.
(angleško: directivity). Smernost je neimenovano razmerje, ki
nam pove, kolikokrat višjo gostoto moči seva antena v
željeni smeri v primerjavi s popolnoma neusmerjeno (izotropno) anteno
pri enaki (nespremenjeni) skupni izsevani moči.
Iz
znanega smernega diagrama izračunamo smernost
![]() tako, da močnostni smerni diagram v smeri največjega
sevanja
tako, da močnostni smerni diagram v smeri največjega
sevanja
![]() delimo s celotno sevano močjo, to je seštevkom
(integralom) močnostnega smernega diagrama
delimo s celotno sevano močjo, to je seštevkom
(integralom) močnostnega smernega diagrama
![]() v vseh smereh v polnem prostorskem kotu
v vseh smereh v polnem prostorskem kotu
![]() .
Smernost pogosto preračunamo v decibele glede na izotropno
anteno
.
Smernost pogosto preračunamo v decibele glede na izotropno
anteno
![]() .
.
Soroden
pojem smernosti je dobitek
![]() (angleško: gain), ki ga nemarni Talibani zgrešeno
imenujejo ojačanje. Antena ničesar ne ojačuje!
Kvečjemu usmerja sevanje našega oddajnika tja, kamor
želimo. Dobitek antene
(angleško: gain), ki ga nemarni Talibani zgrešeno
imenujejo ojačanje. Antena ničesar ne ojačuje!
Kvečjemu usmerja sevanje našega oddajnika tja, kamor
želimo. Dobitek antene
![]() je zmnožek sevalnega izkoristka in smernosti antene. Tudi dobitek je
neimenovano razmerje, zato ga pogosto preračunamo v decibele
glede na izotropno anteno
je zmnožek sevalnega izkoristka in smernosti antene. Tudi dobitek je
neimenovano razmerje, zato ga pogosto preračunamo v decibele
glede na izotropno anteno
![]() .
.
Dobro
načrtovane antene imajo sevalni izkoristek
![]() blizu enote. Pri takšnih antenah je dobitek
blizu enote. Pri takšnih antenah je dobitek
![]() zelo blizu smernosti. Dodatno zmešnjavo povzroča merska
enota
zelo blizu smernosti. Dodatno zmešnjavo povzroča merska
enota
![]() oziroma decibeli glede na polvalovni dipol. Ker znaša smernost
polvalovnega dipola
oziroma decibeli glede na polvalovni dipol. Ker znaša smernost
polvalovnega dipola
![]() ,
je povezava med različnimi merskimi enotami smernosti oziroma
dobitka poljubne anteno
,
je povezava med različnimi merskimi enotami smernosti oziroma
dobitka poljubne anteno
![]() oziroma
oziroma
![]() .
.
Ker
je smerni diagram v katerikoli obliki funkcija dveh neodvisnih
spremenljivk, kotov
![]() in
in
![]() ,
je meritev v vseh možnih smereh lahko izredno zamudna. Nalogo si
poenostavimo tako, da izmerimo več skrbno izbranih prerezov
smernega diagrama. Na primer, anteno vrtimo po polarni razdalji
,
je meritev v vseh možnih smereh lahko izredno zamudna. Nalogo si
poenostavimo tako, da izmerimo več skrbno izbranih prerezov
smernega diagrama. Na primer, anteno vrtimo po polarni razdalji
![]() pri izbrani, konstanti zemljepisni dolžini
pri izbrani, konstanti zemljepisni dolžini
![]() .
Isto meritev nato ponovimo pri drugačni zemljepisni dolžini
.
Isto meritev nato ponovimo pri drugačni zemljepisni dolžini
![]() in tako naprej. Dobimo
in tako naprej. Dobimo
![]() različnih prerezov smernega diagrama
različnih prerezov smernega diagrama
![]() ,
,
![]() ,
,
![]() ...
...
![]() .
.
Če
predvidevano rotacijsko simetričen smerni diagram, ki ni odvisen
od zemljepisne dolžine
![]() ,
v grobem zadošča že meritev enega samega prereza smernega
diagrama, da iz njega določimo smernost antene
,
v grobem zadošča že meritev enega samega prereza smernega
diagrama, da iz njega določimo smernost antene
![]() .
Natančnejšo smernost
.
Natančnejšo smernost
![]() merjene antene dobimo tako, da izmerimo več različnih
prerezov smernega diagrama. V primeru preproste antene izmerimo
najmanj dva med sabo pravokotna prereza, na primer v ravnini vektorja
električnega polja
merjene antene dobimo tako, da izmerimo več različnih
prerezov smernega diagrama. V primeru preproste antene izmerimo
najmanj dva med sabo pravokotna prereza, na primer v ravnini vektorja
električnega polja
![]() in v ravnini vektorja magnetnega polja
in v ravnini vektorja magnetnega polja
![]() .
.
Iz
![]() grobih ocen smernosti
grobih ocen smernosti
![]() v
v
![]() različnih prerezih nato izračunamo dosti natančnejšo
smernost
različnih prerezih nato izračunamo dosti natančnejšo
smernost
![]() :
:
Kaj
torej potrebujemo za merjenje smernosti
![]() antene? Predvsem potrebujemo primeren prostor. Ker si gluhe sobe
verjetno ne moremo privoščiti, bomo merili na prostem,
najboljše sredi travnika. Potrebujemo primerna oddajnik in
sprejemnik. Potrebujemo najmanj dve anteni, od teh je lahko samo ena
merjenec, lahko sta obe. Potrebujemo vrtiljak za merjeno anteno in
stojalo za drugo anteno. Oba vrtiljak in stojalo morata omogočati
različne vgradnje anten za meritev različnih prerezov
smernega diagrama.
antene? Predvsem potrebujemo primeren prostor. Ker si gluhe sobe
verjetno ne moremo privoščiti, bomo merili na prostem,
najboljše sredi travnika. Potrebujemo primerna oddajnik in
sprejemnik. Potrebujemo najmanj dve anteni, od teh je lahko samo ena
merjenec, lahko sta obe. Potrebujemo vrtiljak za merjeno anteno in
stojalo za drugo anteno. Oba vrtiljak in stojalo morata omogočati
različne vgradnje anten za meritev različnih prerezov
smernega diagrama.
Sicer gre tudi s papirjem in svinčnikom, ampak v današnjih časih je smiselno shraniti (številne!) rezultate meritev različnih prerezov smernega diagrama v osebni računalnik. Računalnik potrebuje primerne vmesnike do vrtiljaka in sprejemnika. Na istem ali drugem računalniku s primernim programom seštejemo (integriramo) izsevano moč in izračunamo smernost.
3. Merilni vrtiljak
Merilni vrtiljak je načrtovan okoli koračnega motorja. Koračni motor je (običajno) sinhronski stroj s permanentnim magnetom v rotorju. Tako polovi čevlji statorja kot polovi čevlji rotorja so nažagani, da ima motor dosti višje število korakov od števila polovih čevljev. Koračni motorji imajo nižje vrtljaje in višji navor od običajnih sinhronskih strojev.
Koračni motorji imajo večinoma dve navitji s srednjim odcepom vsako. V preprostem svetu digitalij imenujejo takšne motorje štirifazni. Vsako fazo krmili en stikalni tranzistor, ki pomakne gred motorja naprej ali nazaj za en korak. Koraki so največkrat 1.8°, da gred naredi en poln obrat 360° po 200 korakih ali 50 ciklih krmiljenja. Pri tem je istočasno vključen samo en tranzistor oziroma samo ena polovica od enega navitja.
Če dopustimo, da sta hkrati lahko vključeni tudi dve navitji, dobimo še polovične korake, število korakov se podvoji. Če pa navitji krmilimo z nastavljivimi tokovnimi viri, lahko položaj gredi nastavljamo popolnoma zvezno. Med sosednjima korakoma se premikamo tako, da tok v enem navitju zvezno nižamo in hkrati tok v drugem navitju zvezno višamo.
Na opisani osnovi delujejo sodobni CNC "mikrostep kontrolerji". Slednji z zveznim nastavljanjem tokov v navitjih zmorejo tudi 25600 in več korakov v enem obratu gredi 360°, čeprav uporabljajo koračni motor za "samo" 200 korakov. Takšen način krmiljenja koračnega motorja popolnoma ustreza tudi merilnemu vrtiljaku za manjše antene.
Krmiljenje elektromotorja je za sodobno elektroniko počasna naloga. S ciljem čim višjega izkoristka je smiselno uporabiti pulzno-širinsko modulacijo (PWM) in pripadajoči močnostni stikalni ojačevalnik. Za razliko od zgodovinskega mikroprocesorja Z80CPU ima danes prav vsak spodoben mikrokrmilnik vgrajen odličen hardverski PWM krmilnik. Torej mikroprocesorju ostanejo časovno nezahtevne naloge: nastavljanje širine impulzov, sprejem ukazov s tipk, krmiljenje malega LCD in najpomembnejše, vmesnik do osebnega računalnika, ki bo krmilil meritev in shranjeval rezultate.
Kot mikrokrmilnik sem brez oklevanja izbral LPC2318/01, ker je zanj razvita in dobro preverjena univerzalna ploščica. Na slednji je še USB vmesnik FT231XS, preko katerega se da vpisati program v FLASH pomnilnik LPC2138/01 kot tudi krmiliti vrtiljak in odčitavati položaj gredi preko navideznih USB COM vrat. Programiranje LPC2318/01 gre v preprostem in učinkovitem zbirniku ARM.
Na isto ploščico mikrokrmilnika lahko neposredno priključimo tipke kot tudi mali alfanumerični LCD z dvema vrsticama po 16 znakov vsaka:
Čip LPC2138/01 vsebuje zelo zmogljiv hardverski PWM s kar 6 izhodi. Žal so nekateri od teh izhodov napeljani na zunanje priključke, ki jih potrebujemo za druge naloge, na primer UART0 za komunikacijo z osebnim računalnikom. V opisani nalogi ostanejo na razpolago samo trije PWM, od teh jih krmiljenje koračnega motorja potrebuje najmanj dva.
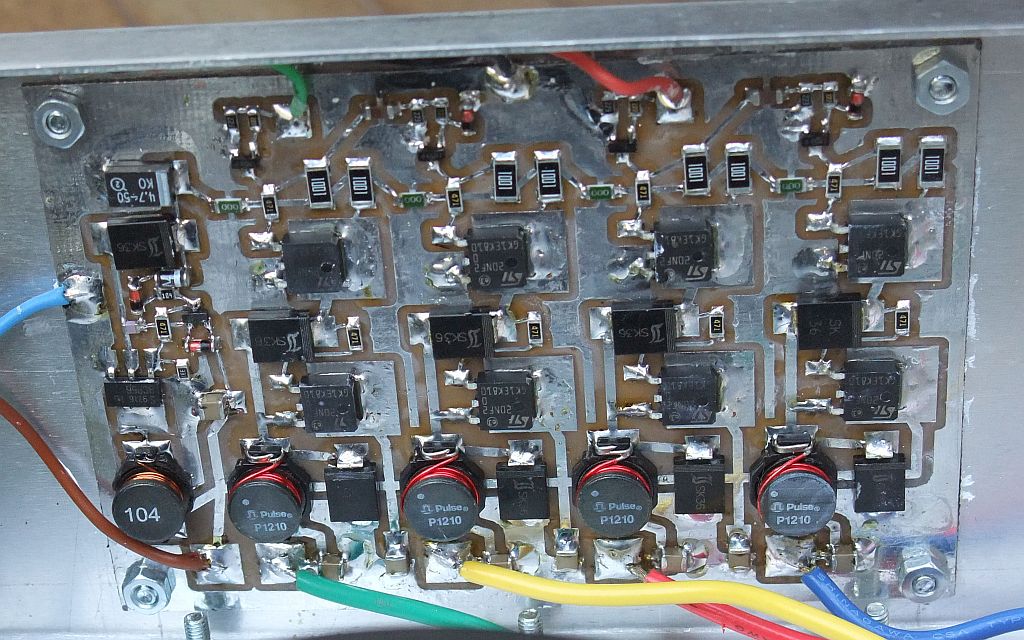
Na razpolago sem imel več različnih koračnih motorjev. Vsi so imeli dve navitji s srednjim odcepom: Vsi so bili izdelani za 200 korakov na obrat pri razmeroma nizkih napetostih od 2V do 5V in tokovih do 3A. Odločil sem se za mostični stikalni ojačevalnik z napajanjem 5V=. Čeprav za takšno nalogo zagotovo obstaja množica integriranih vezij, sem stikalni ojačevalnik rajši sestavil sam iz delov, ki so bili pri roki:
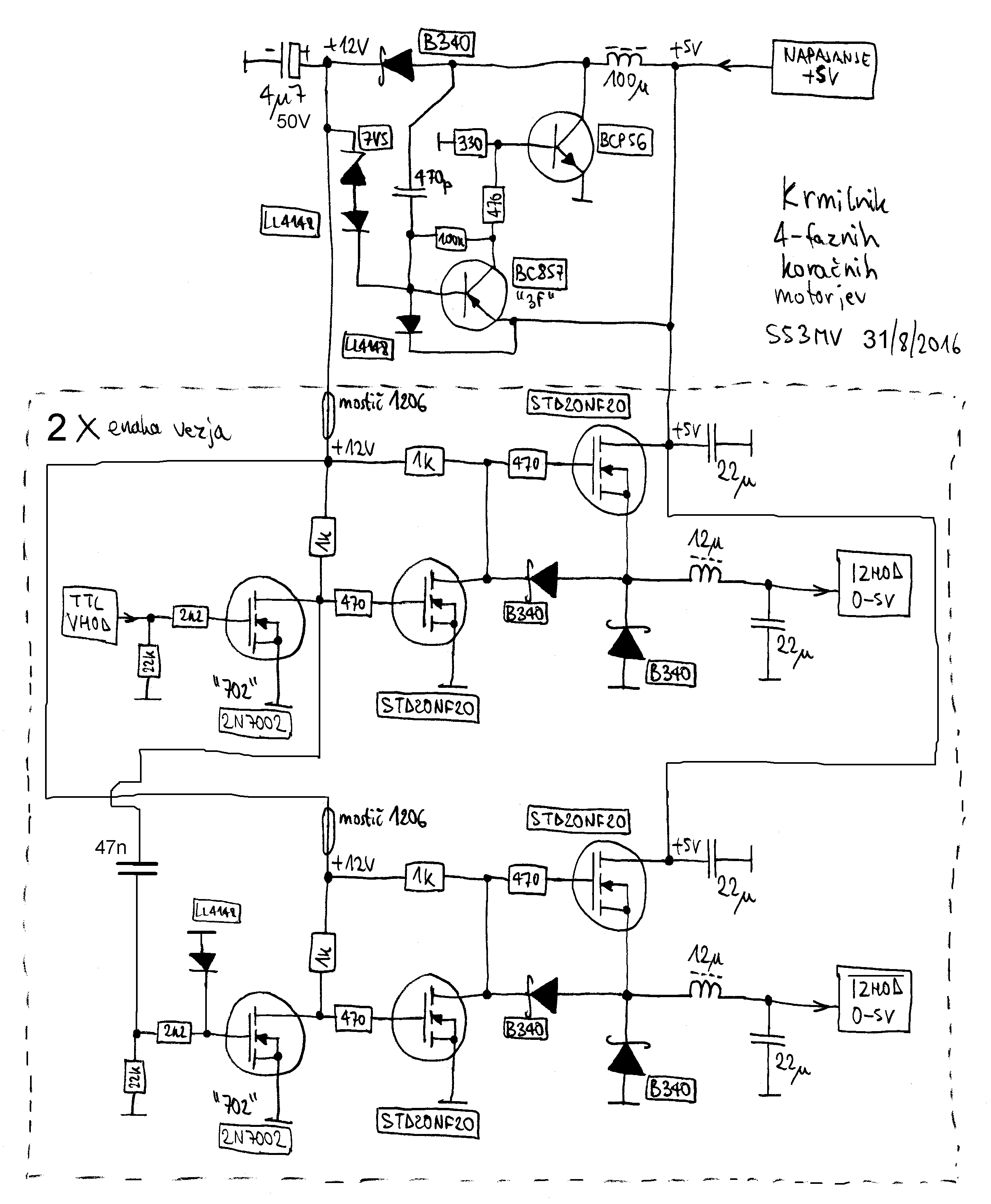
Ojačevalnik vsebuje dva enaka mostička za dve navitji koračnega motorja. Srednji odcepi navitij pri tem niso povezani nikamor! Stikalni gradniki so močnostni N-kanalni poljski tranzistorji z induciranim kanalom STD20NF20 (200V/20A) v ohišju D-PAK SOT-252. Niso najprimernejši. V opisanem vezju bi se zagotovo boljše obnesli tranzistorji za nižje napetosti, ki imajo nižjo upornost kanala.
Vsaka veja mostička vsebuje tri tranzistorje. Malosignalni MOSFET 2N7002 prestavi TTL PWM izhod mikrokrmilnika na raven, primerno za krmiljenje prvega močnostnega MOSFETa STD20NF20. S pomočjo dveh Schottky diod B340 (SMD za nazivni tok 3A) prvi močnostni MOSFET hkrati krmili koračni motor kot tudi vrata drugega močnostnega MOSFETa STD20NF20.
Prikazano vezje ni najhitrejše niti nima najnižjih preklopnih izgub. Je pa preprosto in zelo zanesljivo, ker močnostna MOSFETa prav v nobenem primeru ne moreta biti vključena hkrati. Vsak PWM izhod mikrokrmilnika neposredno krmili prvo vejo pripadajočega mostička. Druga veja mostička je kapacitivno sklopljena (47nF) na prvo vejo, da je ob resetu mikrokrmilnika stanje obeh vej enako in je tok skozi koračni motor enak nič.
Izhoda obeh vej mostička krmilita navitje elektromotorja preko nizkoprepustnega LC sita 12μH+22μF. Zaradi velike stresane induktivnosti navitja koračnega motorja LC sito sicer ni nujno potrebno. V opisanem vezju sito slabša izkoristek ojačevalnika, ampak izboljšuje njegovo linearnost, kar pomeni bolj enakomerno vrtenje gredi koračnega motorja. LC sito tudi omejuje motnje, ki jih seva stikalni ojačevalnik.
Stikalni ojačevalnik se napaja z napetostjo +5V=, ki je dodatno glajena s številnimi keramičnimi večslojnimi kondenzatorji 22μF (zadošča 6.3V). Oba mostična ojačevalnika potrebujeta še +12V= za krmiljenje vrat močnostnih tranzistorjev, za kar poskrbi mali stikalni napajalnik s tranzistorjema BC308 in BCP56 ter tuljavo 100μH, skupen obema mostičkoma.
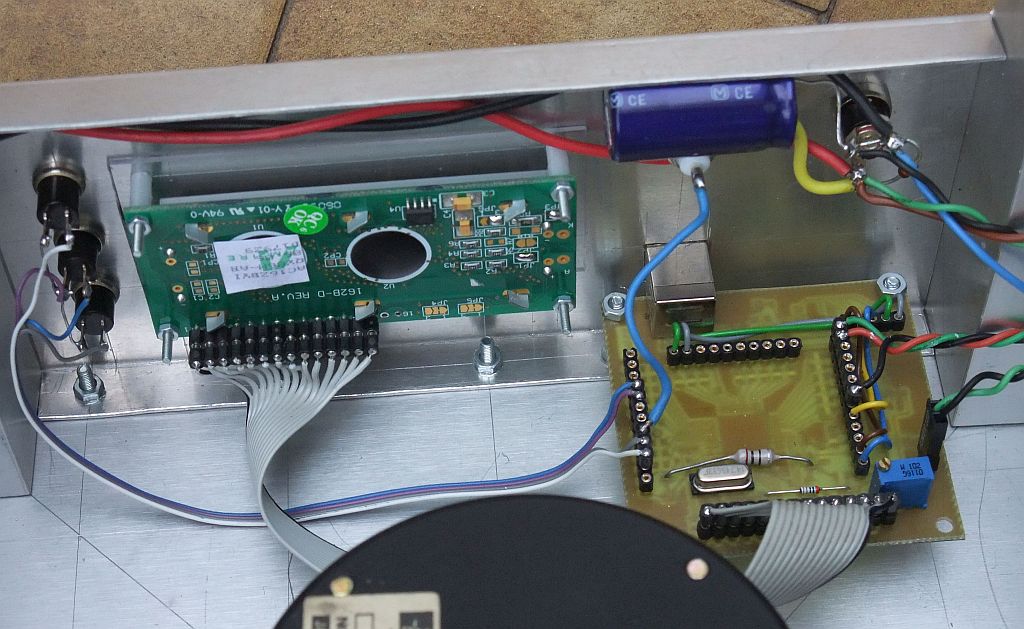
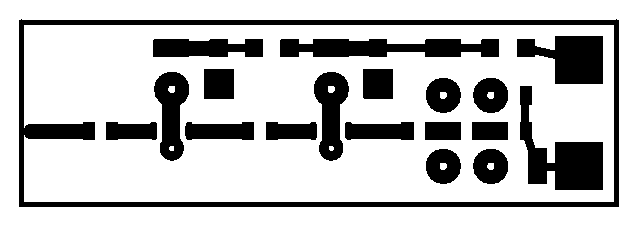
Stikalni ojačevalnik je izdelan na dvostranskem tiskanem vezju iz vitroplasta debeline 0.8mm z izmerami 70mmX100mm. Gornja stran tiskanega vezja je prikazana na spodnji sliki:

Spodnja stran ni jedkana niti pokositrana, da zagotavlja boljši toplotni stik do hladilnega rebra, ki je lahko kar stranica aluminijastega ohišja. Toplotni stik dodatno izboljša silikonska mast med tiskanim vezjem in rebrom. Vsi močnostni gradniki: poljski tranzistorji, Schottky diode in tuljave se ohlajajo kar preko velikih bakrenih otokov na tiskanem vezju:
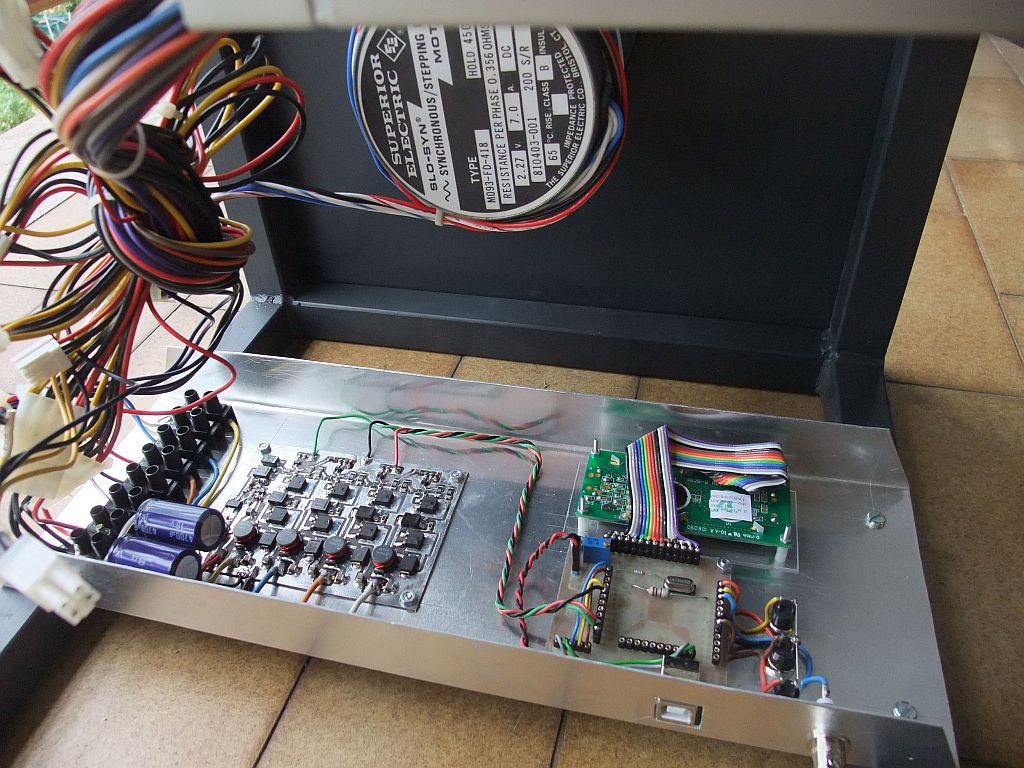
Poraba stikalnega ojačevalnika je okoli 3A pri napajanju +5V= odvisno od krmiljenja PWM. Ploščica mikrokrmilnika prav tako potrebuje +5V= in to napajanje lahko dobi iz dveh strani: iz osebnega računalnika preko USB ali iz stikalnega ojačevalnika. Za šolske vrtiljake je bila najbolj smiselna uporaba starega PC ATX napajalnika. Pri PC ATX napajalniku je treba prevezati signalni vod za vklop na +5VSB, da se vklopi glavnina napajalnika.
Stikalni ojačevalnik napajamo iz glavnega izhoda +5V PC ATX napajalnika. Ostalih izhodov ne uporabimo. Nekateri PC ATX napajalniki brez pričakovanega bremena sploh nočejo delati. V tem primeru pomaga kondenzator 10000μF vzporedno s +5V=. Na spodnji sliki sta prikazana dva kondenzatorja 4700μF vezana vzporedno na +5V=:
Za domači vrtiljak sem načrtoval uporabo kitajskega switcherja za 5V. Teh se mi je nabralo kar nekaj v šari na podstrešju. Žal obremenjeni z nazivnim tokom živijo manj kot eno uro... Torej tudi doma z odsluženim PC ATX napajalnikom? Sicer deluje, ampak meritve na prostem na travi za hišo si lahko odmislim.
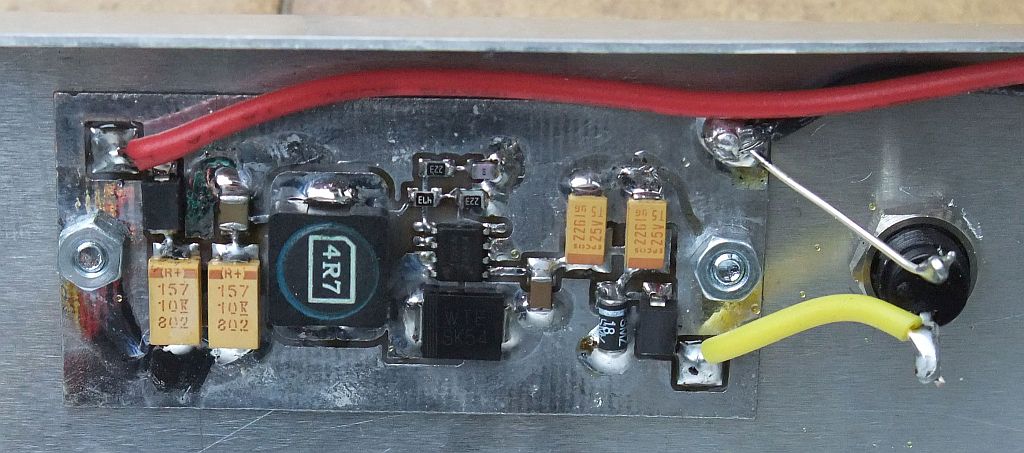
Končno sem v domači vrtiljak vgradil preprost stikalni napajalnik iz +12V= na +5V= z drobcenim integriranim vezjem AOZ1014 in Schottky diodo SK54, oba nazivno za 5A. Tiskanina je kar ista kot v transverterjih za packet radio na 13cm in 9cm, le tuljave so prilagojene višjim tokovom. Deluje presenetljivo dobro, greje se zelo malo. Omogoča mi meritve na prostem z akumulatorjem 12V:
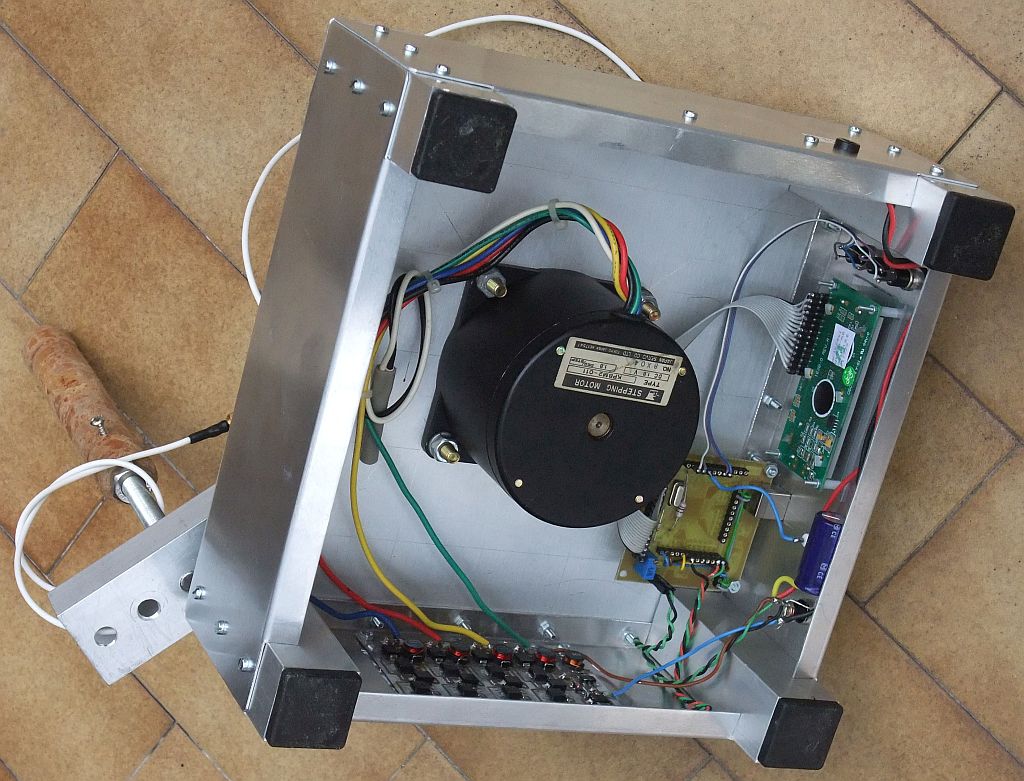
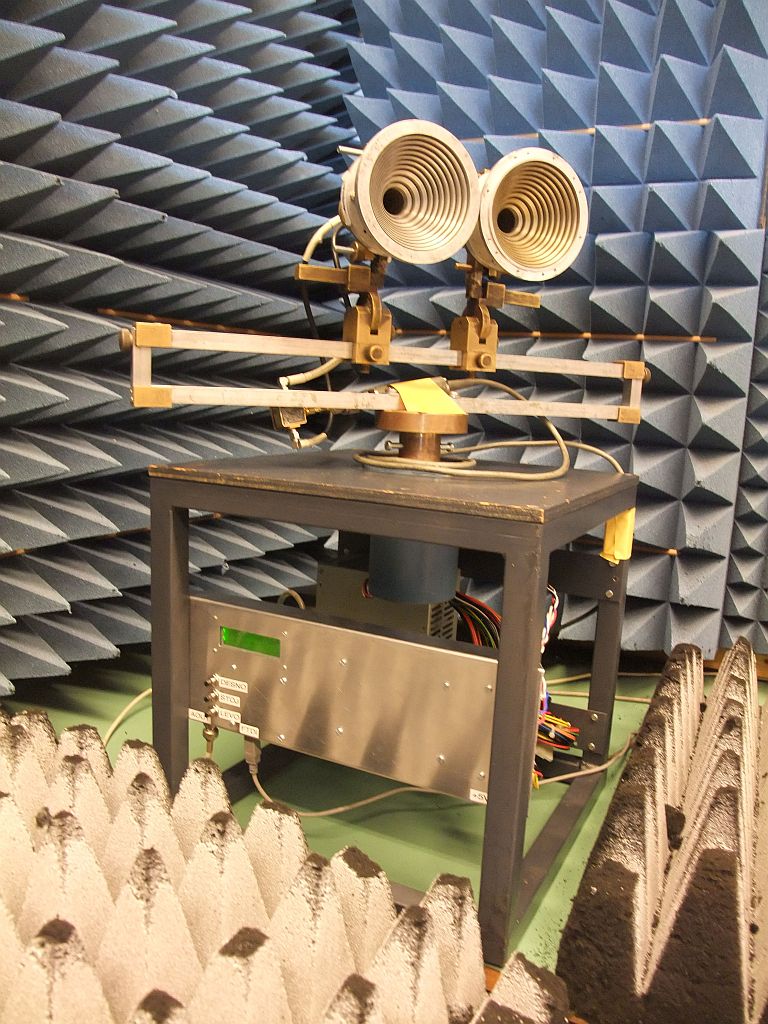
V šolskih vrtiljakih sem recikliral kovinske kocke (stranica 35cm) in koračne motorje, ki smo jih pripravili že pred 25 leti za stare krmilnike z Z80CPU in napajalniki Iskra Delta. Gred omogoča pritrditev različnih nastavkov za šolske merjence:
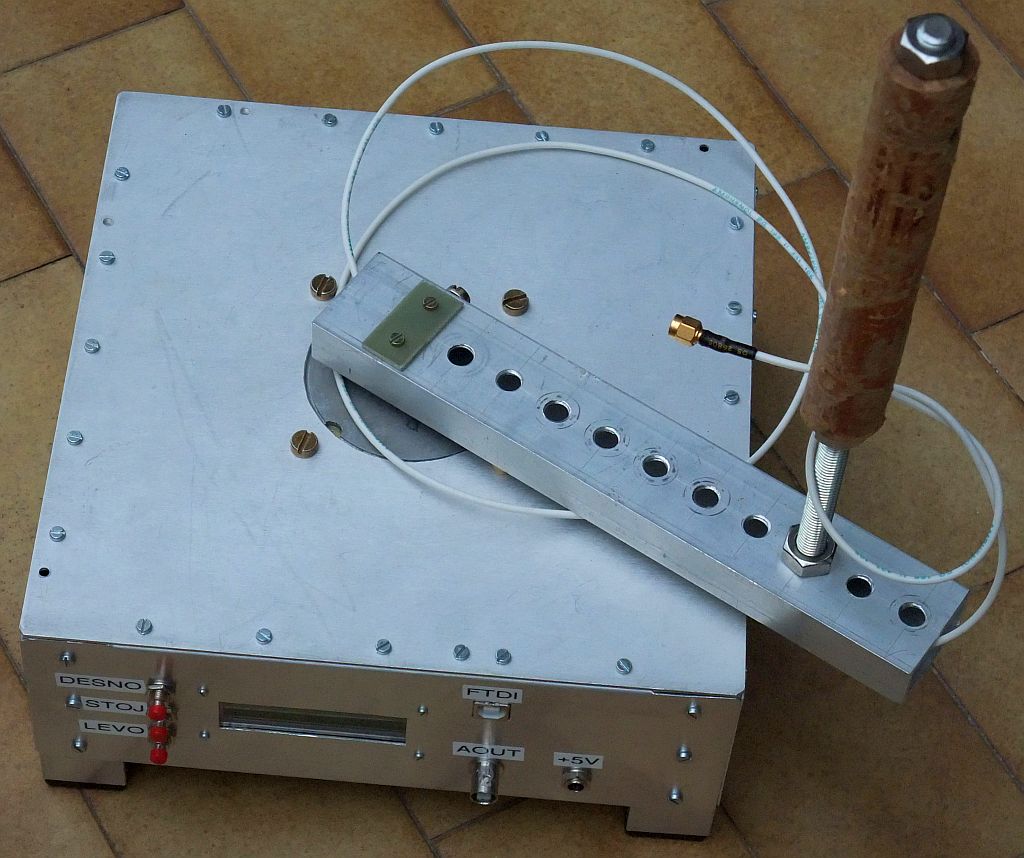
Za domači vrtiljak sem moral izdelati novo ohišje iz aluminija. Pritrditev merjencev je poglavje zase. Na kratkih merilnih razdaljah mora os vrtenja skozi fazno središče antene, to je skozi točko, iz katere navidezno izhaja valovanje. Nalogo sem rešil s pravokotno roko iz Al profila 20mmX40mm, v katero se privije pokončna navojna palica M10. Na navojno palico se natakne bakelitna cev z zunanjim premerom 25mm na dva načina: pokonci za en prerez smernega diagrama in pravokotno na navojno palico za drugi prerez smernega diagrama. Objemka antene v obeh primerih zagrabi za bakelitno cev:
Vsi obnovljeni oziroma izdelani vrtiljaki imajo vtičnice USB (PC računalnik), BNC (DAC izhod za analogni risalnik), napajanje +5V= in dodatno napajanje 230V~ oziroma +12V=. Poleg vtičnic imajo tri tipke za krmiljenje in mali LCD z dvema vrsticama po 16 znakov vsaka.
Sedanji firmware mikrokrmilnika (v20.s) omogoča naslednje ukaze tipk:
DESNO - vrti desno do končnega položaja 360°, 180°, 90° ali 45°,
LEVO - vrti levo do začetnega položaja 0°,
STOJ - ustavi vrtenje,
DESNO+STOJ hkrati - povečaj hitrost vrtenja,
LEVO+STOJ hkrati - zmanjšaj hitrost vrtenja,
Vse tri tipke hkrati: menjaj območje vrtenja 360°/180°/90°/45°.
Vrtiljak prejema ukaze tudi preko UART0 115200bps, 8bits, no parity, torej preko USB Virtual Com Port FT231XS. Ukaze lahko pošljemo ročno s primernim terminalskim programom oziroma jih pošilja krmilni program meritve v Pythonu. Vsak ukaz je en sam ASCII znak:
0 - nastavi hitrost vrtenja 0 (najpočasneje),
1 - nastavi hitrost vrtenja 1,
2 - nastavi hitrost vrtenja 2,
3 - nastavi hitrost vrtenja 3,
4 - nastavi hitrost vrtenja 4,
5 - nastavi hitrost vrtenja 5 (običajna meritev smernega diagrama),
6 - nastavi hitrost vrtenja 6,
7 - nastavi hitrost vrtenja 7 (najhitreje za povratek),
@ - nastavi območje vrtenja 360°,
A ali a - nastavi območje vrtenja 180°,
B ali b - nastavi območje vrtenja 90°,
C ali c - nastavi območje vrtenja 45°,
D ali d - vrti desno do končnega položaja 360°, 180°, 90° ali 45°,
L ali l - vrti levo do začetnega položaja 0°,
S ali s - ustavi vrtenje.
Vrtiljak pošilja svoj položaj v stopinjah v obliki: XXX.X<CR><LF>
Položaja ne pošilja stalno, pač pa le ob katerikoli spremembi položaja oziroma ob prejetju kateregakoli ukaza (kateregakoli ASCII znaka). Neveljavni ukazi nimajo učinka na obnašanje vrtiljaka, pač pa samo prožijo odgovor položaja.
Pozor! Ploščica mikrokrmilnika LPC2138/01 ima običajno nastavljene mostičke tako, kot zahteva programiranje s FlashMagic: nadzorni vod /RTS proži /BOOTLOADER, nadzorni vod /DTR pa /RESET. Priporočam terminalski program Termite3.2, ki teh nadzornih vodov ne uporablja za razliko od nekaterih drugih terminalskih programov. Termite3.2 odda odtipkani niz znakov šele, ko pritisnemo ENTER.
Ob vklopu napajanja oziroma ob kateremkoli resetu (reset uporabljenega mikrokrmilnika proži RS232 nadzorni vod /DTR) vrtiljak obmiruje, števec položaja se ponastavi na 000.0°, hitrost vrtenja na 4 in območje vrtenja na 360°.
Števec položaja v mikrokrmilniku nič ne ve za dejanski položaj gredi koračnega motorja. Začetni položaj merjenca preprosto nastavimo tako, da izklopimo elektroniko vrtiljaka, ročno obrnemo anteno in ponovno vklopimo napajanje vrtiljaka. Pri tem preverimo, kam se bo vrtiljak zavrtel in kako se bo pri tem ovijal kabel do merjenca na vrtiljaku.
Mikrokrmilnik LPC2138/01 je programiran za štirikratno frekvenco kristala 14.7456MHz, kar daje uro procesorja in periferije 58.9824MHz. PWM enota je programirana za modulo 2880, kar pomeni frekvenco PWM 20.48kHz. PWM enota krmili dva izhoda P0.8/PWM4 in P0.9/PWM6 za dve fazi koračnega motorja.
Razmerje impulz/pavza 1440/1440 nastavi tok nič v pripadajočem navitju. Višje razmerje impulz/pavza pomeni nastavljanje toka v eno smer, nižje razmerje impulz/pavza pa nastavljanje toka v drugo smer v navitju koračnega elektromotorja. Z nastavljanjem razmerij impulz/pavza obeh PWM izhodov se da pripeljati gred elektromotorja v poljuben položaj.
Firmware mikrokrmilnika je napisan tako, da vsak korak elektromotorja po 1.8° razdeli še na 64 mikrokorakov. Gred elektromotorja torej naredi en poln obrat 360° v 12800 mikrokorakih. En cikel vseh štirih faz motorja oziroma 7.2° sicer predstavlja štiri korake oziroma 256 mikrokorakov. Velikosti tokov obeh navitij, ki pripeljejo gred motorja v željeni položaj, preprosto vpišemo v tabelo. Tabela potrebuje le 256 vnosov, saj se po enem ciklu vseh štirih faz koračnega motorja ponavlja.
Kako sestaviti tabelo tokov, je cela znanost. Moji glasno zavijajoči vrtiljaki izpred 25 let so uporabljali preprosto linearno interpolacijo med sosednjima korakoma elektromotorja, saj kaj več zgodovinski Z80CPU ni zmogel. S stališča enakomernosti vrtenja linearna interpolacija oziroma trikotna oblika tokov v navitjih niso najboljši.
Sinhronski stroj brez feromagnetnih jeder bi za enakomerno vrtenje zahteval krmiljenje dveh med sabo pravokotnih navitij s sinusom in kosinusom. Krmiljenje s tokovoma oblike sinusa in kosinusa uporabljajo tudi tržno dobavljivi "CNC mikrostep kontrolerji". Končni rezultat je odvisen od koračnega motorja. Gredi nekaterih koračnih motorjev se s sinusom in kosinusom vrtijo res enakomerno.
Gredi drugih koračnih motorjev z enakima sinusom in kosinusom "cukajo". Neenakomerna hitrost vrtenja se pretvori v zibanje antene. Antena namreč predstavlja znatno maso na veliki ročici, torej velik vztrajnostni moment. Magneti motorja se odmiku gredi iz mirovne lege upirajo z navorom, torej delujejo kot vzmet nihala. Dušenje takšnega nihala je razmeroma majhno, zato že manjše periodično nihanje kotne hitrosti gredi povzroči znatno zibanje antene!
Razlog za neenakomerno vrtenje gredi motorja gre iskati v obliki polovih čevljev na rotorju in statorju koračnega motorja. Oglati čevlji zagotovo pomenijo lihe harmonike. Vzrok nelinearnosti je lahko tudi magnetilna krivulja feromagnetnih jeder v koračnem motorju. Končno tudi električni ojačevalnik v krmilniku motorja dodaja svojo nelinearnost.
Slepi poskusi, da bi dosegel enakomernejše vrtenje gredi z drugačno tabelo vrednosti tokov, niso obrodili nobenih rezultatov. V zahtevni nalogi je nujno nadležen pojav najprej izmeriti, nato ovrednotiti in končno izračunati najprimernejši protiukrep. Kaj pa lahko na gredi elektromotorja sploh dovolj natančno izmerim?
Rešitev je piezoelektrični žiroskop, ki zna natančno meriti kotno hitrost okoli izbrane osi. Izhod analognega piezoelektričnega žiroskopa (takšen brez vgrajenih digitalij za obdelavo signala) je enosmerna napetost. V mirovanju je to polovica napajanja ali 2.5V. Glede na smer vrtenja se ta napetost zviša ali zniža in to natančno premo sorazmerno kotni hitrosti. Pasovna širina žiroskopov za avtomobilski ESP je okoli 10Hz, torej je z njimi mogoče zaznati in natančno meriti zibanje antene na vrtiljaku.
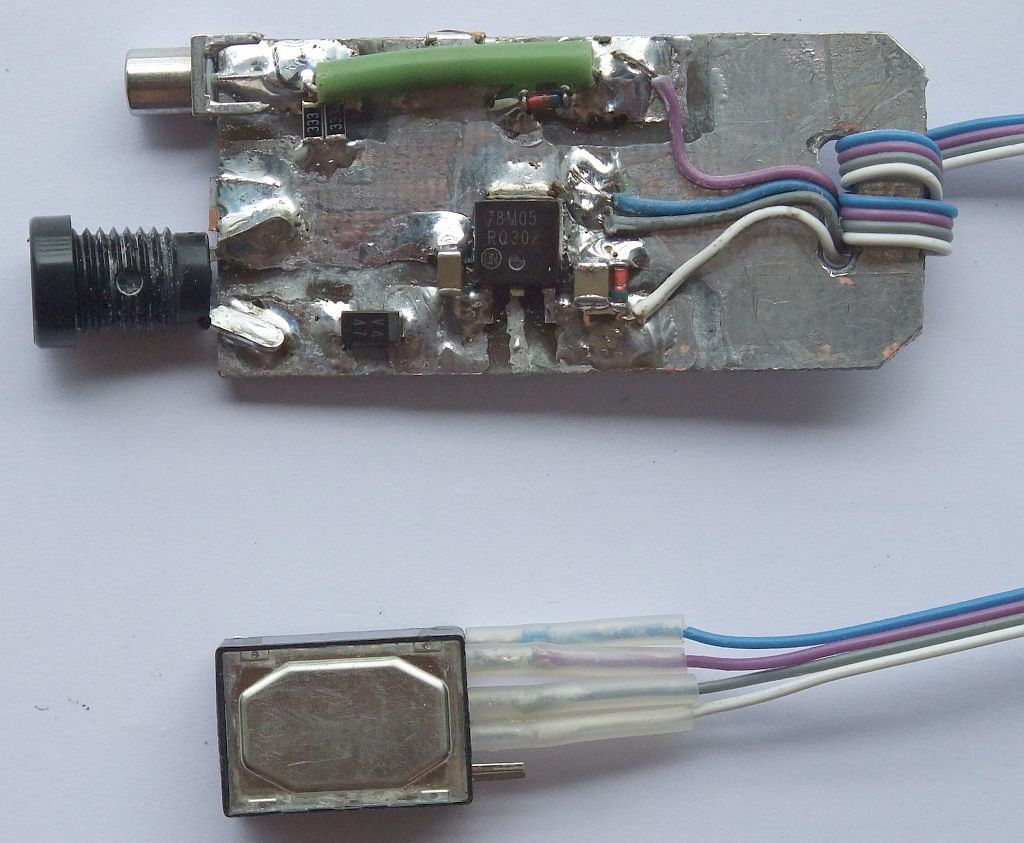
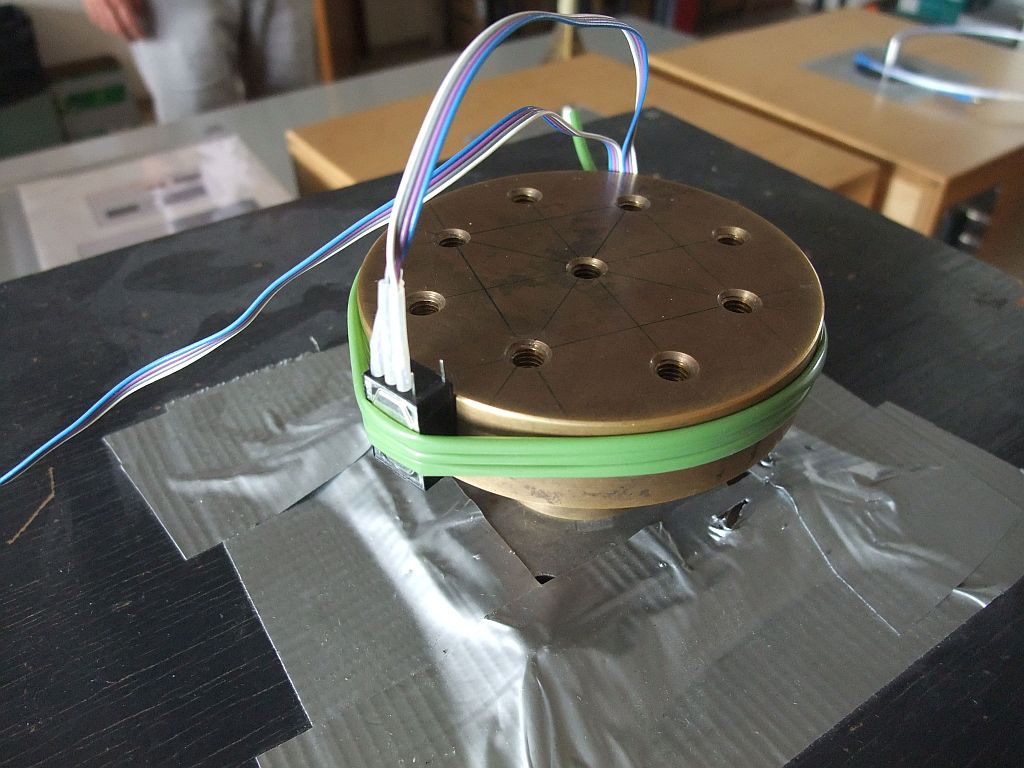
Meritev kotne hitrosti gredi sem izvedel s starejšim avtomobilskim žiroskopom Murata Gyroatar ENV-05G. Slednji potrebuje stabilizirano napajanje +5V in vmesnik do osciloskopa:
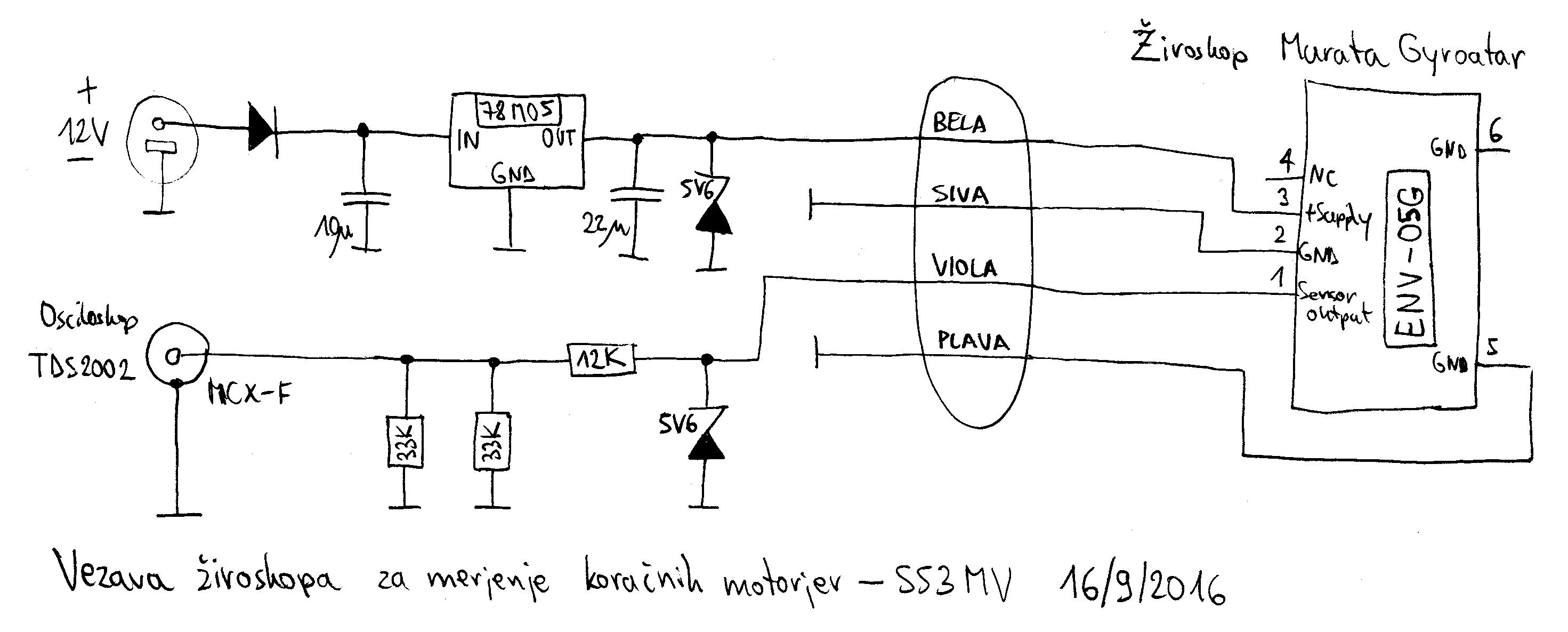
Napajalnik in vmesnik sem izdelal na koščku vitroplasta s pripadajočimi vtičnicami. Od tu gre tanek štirižilni kabelček dolžine poldrugega metra do samega žiroskopa, da ne ovira vrtenja:
Za meritev kotne hitrosti pritrdimo žiroskop na gred elektromotrja oziroma na nastavek vrtiljaka za anteno. Za meritev zadošča, da je os žiroskopa vzporedna z osjo vrtenja. Na spodnji sliki je žiroskop pritrjen na nastavek vrtiljaka z zeleno elastično silikonsko cevko. Priključni kabelček je še dodatno pritrjen na vrteči nastavek, da ne bi kam povlekel žiroskopa in tako kazil meritve:
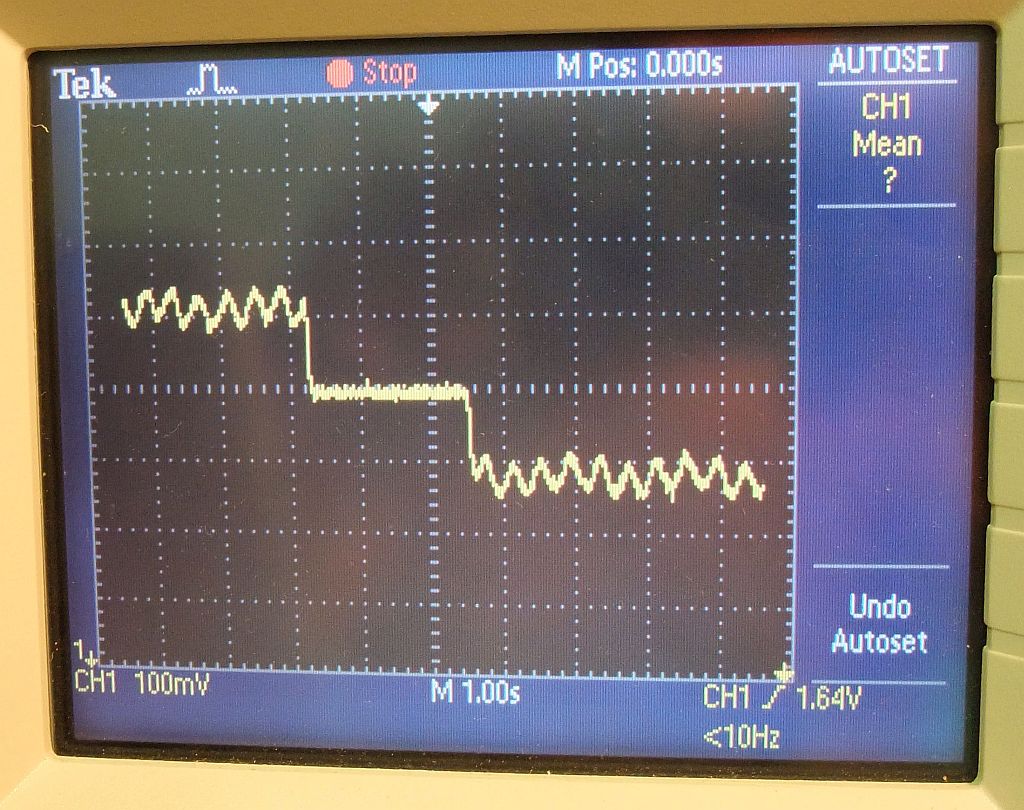
Meritev kotne hitrosti gredi koračnega motorja s piezoelektričnim žiroskopom je končno pokazala nadlogo v pravi luči. Meritev potrebuje spominski (digitalen) osciloskop, saj znaša hitrost preleta samo 1 razdelek na sekundo. Prvo meritev sem napravil pri krmiljenju elektromotorja s tokovoma oblike sinusa in kosinusa.
Na sliki je prikazano najprej vrtenje gredi v desno, nato zaustavitev in končno vrtenje gredi koračnega elektromotorja v levo. Iz slike je razvidno, da je mirovanje gredi neoporečno, kotna hitrost je takrat enaka nič. Ko pa se gred elektromotorja vrti, kotna hitrost ni konstantna. Kotna hitrost naredi en nihaj znotraj vsakega koraka elektromotorja 1.8°. Na spodnji sliki je prikazan razmeroma blag primer nadloge, ko je največja vrednost kotne hitrosti samo za 50% višja od najnižje vrednosti kotne hitrosti:
Vzrok zibanja antene med vrtenjem koračnega motorja je torej razkrinkan, izmerjen in natančno ovrednoten. Sledi iskanje primernega protiukrepa. Fourierjeva analiza slike z osciloskopa pove, da sta glavna krivca tretja harmonika krmilnih sinusa in kosinusa, ki nastaneta na eni od številnih nelinearnosti sistema: električni ojačevalnik, feromagnetno jedro oziroma oblika polovih čevljev koračnega motorja.
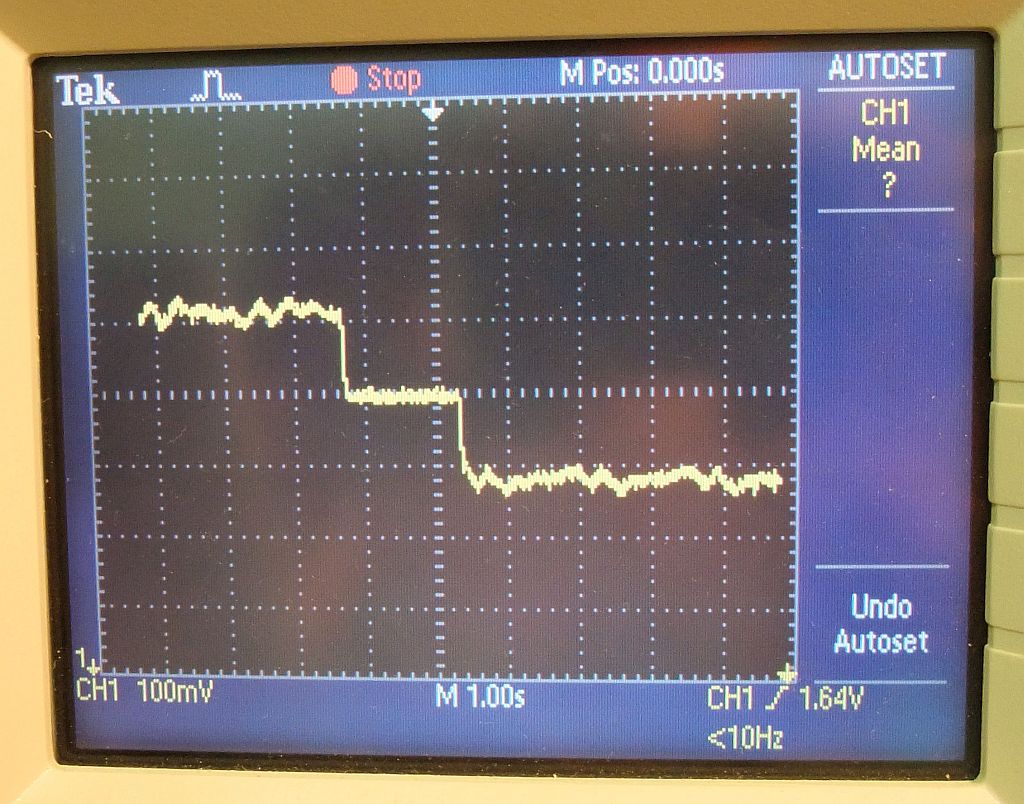
Protiukrep je skrbno preračunan in nadzorovan dodatek tretjega harmonika krmilnima sinusu in kosinusu z obratno fazo, da se skupni tretji harmonik na koncu natančno izniči. Ostanejo napake višjih harmonikov kot tudi napaka enosmerne, ki jo daje offset ojačevalnika. S kompenzacijo tretjega harmonika rezultat sicer ni povsem ravna črta. Kolebanje kotne hitrosti je opazno manjše. Predvsem pa kolebanje hitrosti ne vsebuje več periodičnih komponent, ki bi vzbudile zibanje merjenca:
Amplitudo osnovnega sinusa in kosinusa ter amplitudo njunih tretjih harmonikov nastavimo v glavi firmware "v20.s" v zbirniku ARM. Amplitudi sta v taktih PWM. Na primer, amplituda osnovne 960 pomeni, da širina impulza PWM niha od 480 vse do 2400 taktov okoli osrednje vrednosti 1440 taktov (polovica periode PWM):
;*** Konstante stirifaznega koracnega motorja ***
PWMA EQU 960 ;PWM amplituda osnovne
PWMH EQU -45 ;PWM amplituda 3.harmonika
PWMS EQU 1440 ;PWM sredina
PWMP EQU 2879 ;PWM perioda 2880-1 (20.48kHz)
Šolski vrtiljaki imajo vgrajene razmeroma velike koračne motorje modre barve proizvajalca "SUPERIOR ELECTRIC" tipa M093-FD-407. Za krmiljenje teh motorjev se je izkazala primerna amplituda osnovne 960 taktov. Žiroskop je pokazal, da se gred vrti najbolj enakomerno pri amplitudi tretjega harmonika -45 taktov. Negativna amplituda tretjega harmonika pomeni, da se sinus oziroma kosinus popravljata v smeri signala trikotne oblike.
Domači vrtiljak ima vgrajen nekoliko krajši koračni motor črne barve proizvajalca "JAPAN SERVO" tipa KP8M2-011. Za krmiljenje tega motorja se je izkazala primerna amplituda osnovne 1200 taktov. Žiroskop je pokazal, da se gred vrti najbolj enakomerno pri amplitudi tretjega harmonika +80 taktov. Pozitivna amplituda tretjega harmonika pomeni, da se sinus oziroma kosinus popravljata v smeri signala pravokotne oblike.
Meritve z žiroskopom kažejo, da je vnaprej zelo težko napovedati, v katero smer je treba popraviti krmilni signal sinusne oblike, proti pravokotniku ali proti trikotniku. Edina razlika med domačim in šolskimi vrtiljaki je v vgrajenih koračnih motorjih, ki imajo sicer isto število korakov in podobno upornost navitij. Gradnja novega vrtiljaka z neznanim motorjem torej zahteva novo meritev z žiroskopom ter ustrezno nastavitev obeh amplitud osnovne in tretjega harmonika v firmware mikrokrmilnika.
4. Merilni sprejemnik
Obnovljeni
vrtiljak sem najprej preizkusil v šolskem merilnem mestu za
laboratorijske vaje pri predmetu Antene in razširjanje valov.
Pri laboratorijskih vajah uporabljamo frekvenčni pas
![]() .
Večina vaj je načrtovanih za
.
Večina vaj je načrtovanih za
![]() .
Merilni oddajnik moči približno
.
Merilni oddajnik moči približno
![]() je amplitudno moduliran s
je amplitudno moduliran s
![]() .
.
Visokofrekvenčni
del merilnega sprejemnika vsebuje samo merilno diodo HP11664A
(detektor). Diodi sledi nizkofrekvenčni ojačevalnik z
logaritemskim detektorjem za
![]() HP8755B (Swept Amplitude Analyzer). Izkoriščanje
kvadratičnega odziva diode pri malih signalih omogoča
dinamiko meritve okoli
HP8755B (Swept Amplitude Analyzer). Izkoriščanje
kvadratičnega odziva diode pri malih signalih omogoča
dinamiko meritve okoli
![]() na razdalji približno
na razdalji približno
![]() med sprejemno in oddajno anteno. Prav amplitudna modulacija izbrane
frekvence
med sprejemno in oddajno anteno. Prav amplitudna modulacija izbrane
frekvence
![]() omogoča visoko občutljivost diodnega detektorja in hkrati
odpornost na motnje drugih (nemoduliranih) oddajnikov (druge vaje, ki
istočasno tečejo v laboratoriju!)
omogoča visoko občutljivost diodnega detektorja in hkrati
odpornost na motnje drugih (nemoduliranih) oddajnikov (druge vaje, ki
istočasno tečejo v laboratoriju!)
Postavitev sem najprej preizkusil z analognim risalnikom, kar smo uporabljali pri laboratorijskih vajah skoraj četrt stoletja. Os X risalnika krmili analogni izhod obnovljenega vrtiljaka. Os Y risalnika krmili analogni izhod HP8755B. Če gre vse po sreči, laborant uspe popraviti svinčnik za analogni risalnik (plotter), ki se že vrsto let ne izdeluje več. Študente nato čaka duhamorno delo umerjanja skal obeh osi X in Y risalnika in še dosti bolj duhamorno delo ročnega seštevanja (integracije) smernega diagrama za določanje smernosti antene:

Analogni risalnik sem uspešno zamenjal z A/D pretvornikom. V ta namen sem uporabil še eno ploščico mikrokrmilnika z LPC2138/01 in FT231XS. Vrtiljak pri tem oddaja trenutni položaj preko svojega USB Virtual Com Port, A/D pretvornik pa jakost sprejema preko drugega USB Virtual Com Port. Program na prenosnem računalniku iz obeh izriše merjeni prerez smernega diagrama antene ter izračuna smernost.
Podobno
postavitev si lahko privoščimo tudi v amaterskih
razmerah. Rabljen HP8755B s pripadajočimi diodami verjetno lahko
dobimo poceni, saj ni kdove kako iskan inštrument. Dražji je
mikrovalovni signal generator zadostne izhodne moči in z
možnostjo amplitudne modulacije
![]() .
Slednje radioamaterski oddajniki običajno ne zmorejo.
.
Slednje radioamaterski oddajniki običajno ne zmorejo.
Meritve
preprostih anten majhne/srednje smernosti si lahko privoščimo
tudi z nemoduliranim oddajnikom. Slednji je lahko katerikoli
amaterski oddajnik. Lahko je tudi samo veriga množilnih stopenj
izhodne moči okoli
![]() .
Žal na sprejemni strani niti Schottky dioda z res nizkim pragom (low
barrier) ni dovolj občutljiva. V frekvenčnem pasu do
.
Žal na sprejemni strani niti Schottky dioda z res nizkim pragom (low
barrier) ni dovolj občutljiva. V frekvenčnem pasu do
![]() lahko občutljivost preprostega diodnega detektorja izboljšamo
s cenenimi MMIC širokopasovnimi ojačevalniki:
lahko občutljivost preprostega diodnega detektorja izboljšamo
s cenenimi MMIC širokopasovnimi ojačevalniki:
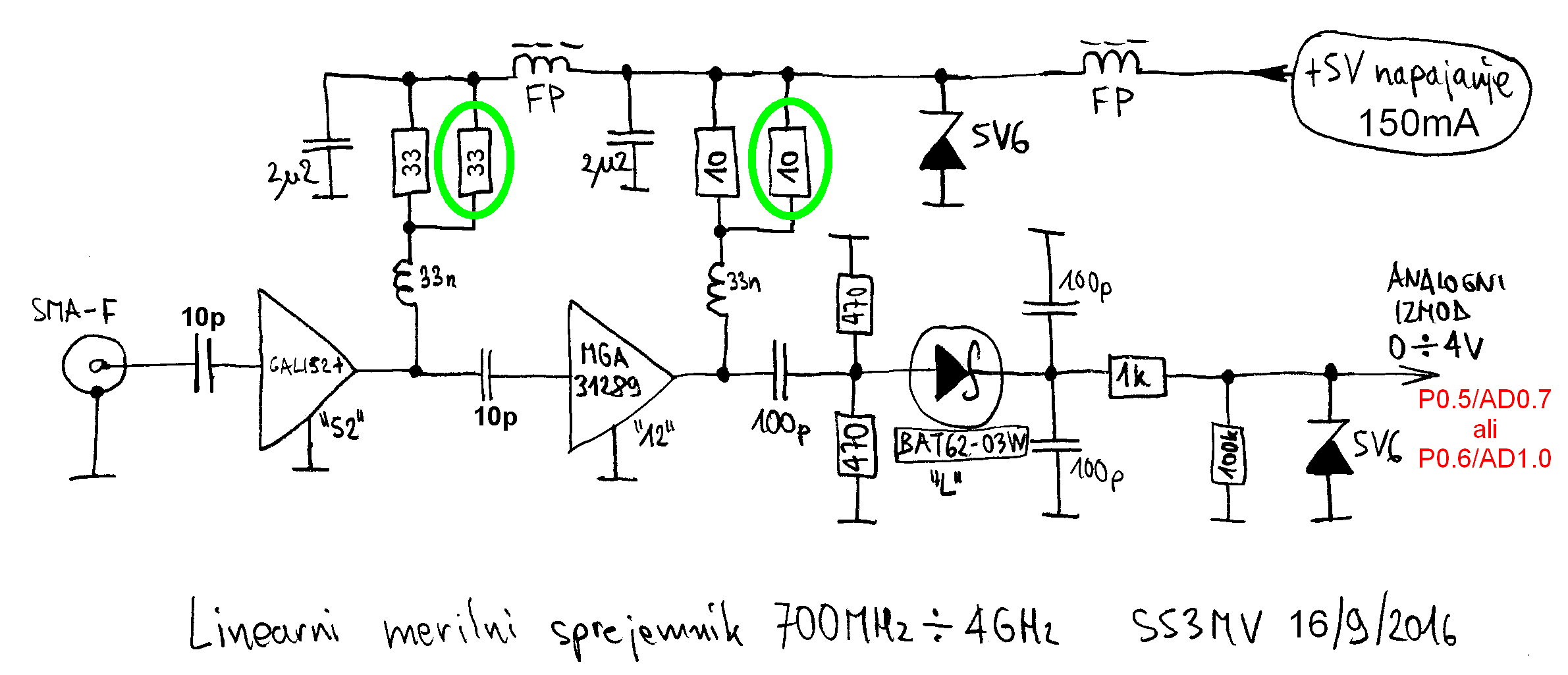
Detektor
merilnega sprejemnika je Schottky dioda BAT62-03W. Slednja ima prag
nižji od
![]() (low barrier) in dodatno difuzijo "guard ring" okoli
Schottky spoja, ki omogoča visoko prebojno napetost
(low barrier) in dodatno difuzijo "guard ring" okoli
Schottky spoja, ki omogoča visoko prebojno napetost
![]() v zaporni smeri. Smiselna občutljivost sprejemnika za antenske
meritve zahteva dodatno ojačanje
v zaporni smeri. Smiselna občutljivost sprejemnika za antenske
meritve zahteva dodatno ojačanje
![]() pred detektorjem. Slednje potrebuje dva širokopasovna MMIC
ojačevalnika.
pred detektorjem. Slednje potrebuje dva širokopasovna MMIC
ojačevalnika.
V
prvi stopnji je uporabljen ojačevalnik GALI-52 s
heterostrukturnimi bipolarnimi tranzistorji (HBT). Druga stopnja mora
zagotavljati čim višjo napetost krmiljenja detektorja
brez nasičenja oziroma popačenj, kar omogoča
ojačevalnik MGA-31289 s HEMTi z induciranim kanalom (E-HEMT).
Spodnja frekvenčna meja sprejemnika okoli
![]() je določena z ojačevalnikom MGA-31289. Nižje frekvence
omogoča sorodnik MGA-31189.
je določena z ojačevalnikom MGA-31289. Nižje frekvence
omogoča sorodnik MGA-31189.
Opisani
dvostopenjski ojačevalnik in detektor BAT62-03W omogočata
nazivno občutljivost sprejemnika do
![]() za polni odklon okoli
za polni odklon okoli
![]() .
Opisani sprejemnik je sicer uporaben za antenske meritve tudi preko
.
Opisani sprejemnik je sicer uporaben za antenske meritve tudi preko
![]() z nekoliko manjšo občutljivostjo. Sprejemnik je izdelan
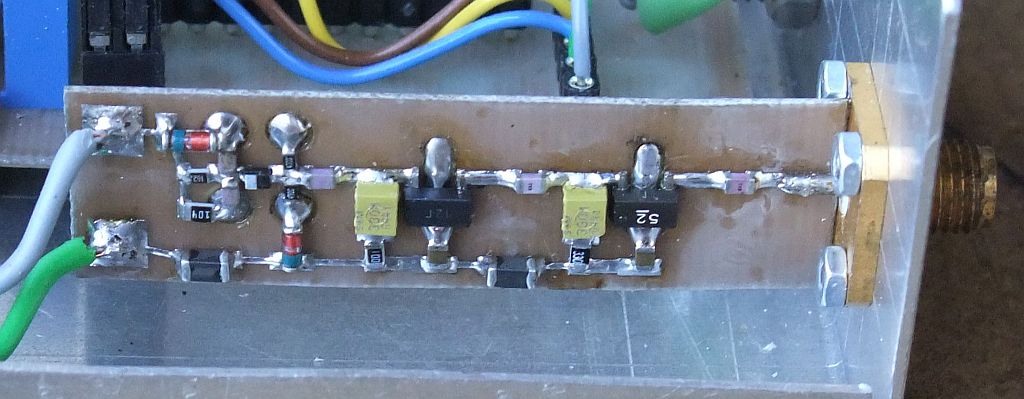
na dvostranskem FR4 debeline 0.6mm z izmerami 15mm X 40mm:
z nekoliko manjšo občutljivostjo. Sprejemnik je izdelan
na dvostranskem FR4 debeline 0.6mm z izmerami 15mm X 40mm:
Druga stran tiskanega vezja ni jedkana. Preko celotne njene površine je prispajkana bakrena folija debeline 0.2mm. Slednja poleg električnih povezav na maso omogoča tudi odvajanje toplote, ki jo sproščata MMIC ojačevalnika. Vhod sprejemnika je prispajkan neposredno na pozlateno prirobnico SMA vtičnice:
Lastnosti MMIC ojačevalnikov so odvisne delovne točke, ki jo določa enosmerni tok skozi ojačevalnik. Ojačevalniki s HBTji (družina GALI in podobne) pri prenizkih tokovih radi samooscilirajo. Ojačevalnik z E-HEMTi bo pri nižjem toku dal manjšo izhodno napetost. Vsi MMIC ojačevalniki sproščajo veliko toplote že pri nazivnem toku. Izbira uporov v napajanju MMICjev: en sam upor ali dva enaka upora vzporedno, je prepuščena graditelju. Z dvema uporoma za vsak MMIC lahko poraba naraste tudi na 150mA!
Detektor BAT62-03W daje na izhodu enosmerno napetost, ki ob izdatnem krmiljenju naraste tudi preko 10V. Zener dioda 5V6 omejuje izhodno napetost sprejemnika na varno vrednost, ki še ne poškoduje običajnih A/D pretvornikov. Pri vhodnem signalu nad pragom Schottky diode je odziv detektorja linearen: izhodna enosmerna napetost je premo sorazmerna amplitudi vhodne visokofrekvenčne napetosti.
Pod
pragom Schottky diode je njen odziv kvadratičen: izhodna
enosmerna napetost je sorazmerna kvadratu vhodne napetosti oziroma
moči visokofrekvenčnega signala. Z uporabo obeh režimov
delovanja diode, kvadratični in linearen, se da doseči
dinamiko meritve jakosti vhodnih signalov okoli
![]() .
Slednja popolnoma zadošča za meritve anten.
.
Slednja popolnoma zadošča za meritve anten.
Sprejemnik potrebuje do osebnega računalnika vmesnik z A/D pretvornikom. Tudi tu je smiselna uporaba mikrokrmilnika LPC2318/01, ker je zanj razvita in dobro preverjena univerzalna ploščica. Na slednji je še USB vmesnik FT231XS, preko katerega se da vpisati program v FLASH pomnilnik LPC2138/01 kot tudi odčitavati jakost sprejema preko navideznih USB COM vrat. Programiranje LPC2318/01 v preprostem in učinkovitem zbirniku ARM omogoča tudi linearizacijo kvadratičnega odziva detektorja pri majhnih signalih in pretvorbo rezultata v logaritemske enote (decibele).
Na mikrokrmilnik sta priključena dva enaka sprejemnika na vhoda P0.5/AD0.7 in P0.6/AD1.0, torej vsak na svoj neodvisen A/D pretvornik. Dva neodvisna sprejemnika sicer nista nujno potrebna za merjenje smernega diagrama ene same antene. Lahko pa dva sprejemnika pohitrita meritev polarizacije in omogoča še kakšen drug poskus z antenami.
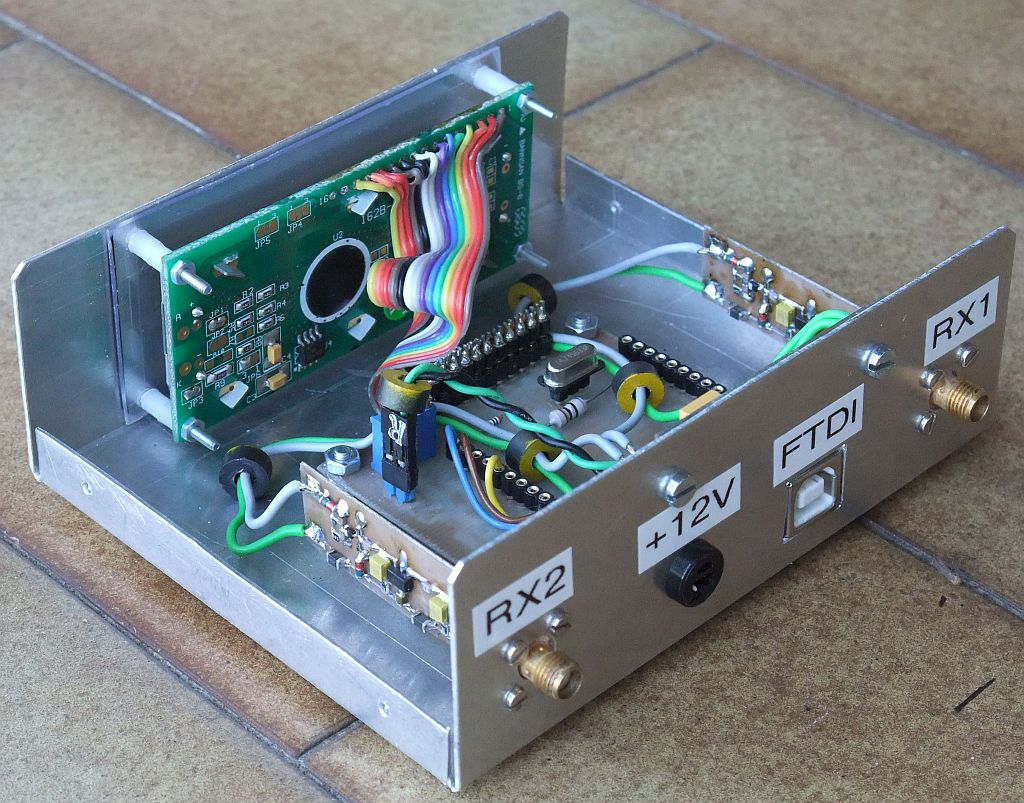
Dva sprejemnika potrebujeta skupaj 300mA. Napajanje +5V obeh sprejemnikov mora biti dobro stabilizirano. Sprejemnikov zato ni smiselno napajati preko USB, pač pa z ločenim napajalnikom. V ohišje naprave je v ta namen vgrajen linearni regulator za +5V iz vtičnice za zunanje napajanje +12V:
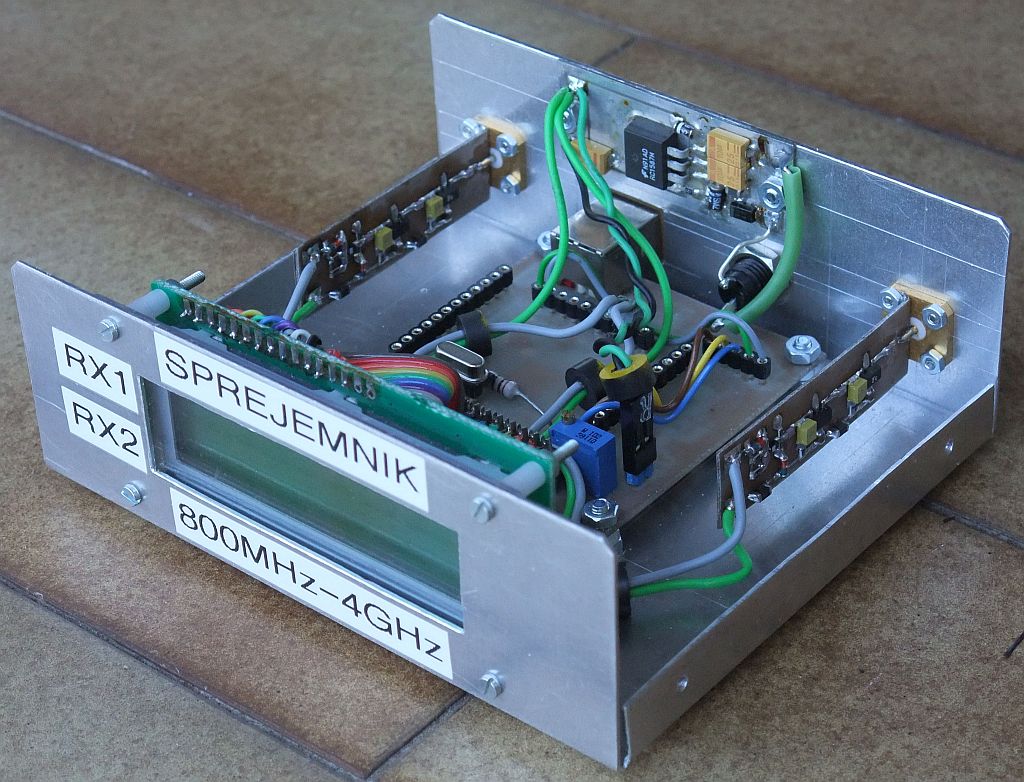
Mikrokrmilnik se seveda lahko napaja po obeh poteh, preko USB in iz zunanjega napajanja. Mikrokrmilnik je opremljen z alfanumeričnim LCD za dve vrstici po 16 znakov. LCD se uporablja grafično. Mikrokrmilnik nanj izrisuje dva rastoča stolpca za oba sprejemnika.
Oba sprejemnika sta visokofrekvenčni vezji. Poskusi so pokazali, da predstavlja kovinsko ohišje s kovinskim pokrovom zadosti dober oklop. V notranjosti ohišja je seveda nujno dušiti neželjene rezonance. Pod kovinski pokrov je vgrajen velik kos črne prevodne plastične pene, da deluje kot mikrovalovni absorber. Nekaj pomagajo tudi feritni obročki na notranjih povezavah:
Opisani dvokanalni merilni sprejemnik (firmware x14.s) ne sprejema nobenih ukazov po RS232. Proti računalniku stalno pošilja po RS232 s hitrostjo 115200bps, 8bits, no parity preko FTDI VCP rezultat meritve v obliki: XX.XX YY.YY<CR><LF>, kjer XX.XX pomeni jakost sprejema prvega kanala v dB in YY.YY jakost sprejema drugega kanala v dB, oboje z ločljivostjo ene stotinke dB.
V izogibanju negativnim številom, ki bi zahtevala oddajo dodatnega ASCII znaka "minus", je polna skala sprejemnika izbrana kot 80.00dB. Slednje ustreza približno -15dBm na vhodu sprejemnika, odvisno od frekvence. Brez vhodnega signala lahko mikrokrmilnik javlja celo 00.00dB, vendar uporabljena Schottky dioda in A/D pretvornik omogočata verodostojne meritve kvečjemu v razponu 40dB, torej je rezultat verodostojen samo med 40.00dB in 80.00dB.
Firmware
(x14.s) mikrokrmilnika najprej izračuna povprečje 144
zaporednih pretvorb obeh 10-bitnih A/D pretvornikov. Povprečje
meritev se nato obdela z algoritmom, ki linearizira odziv detektorja
s Schottky diodo BAT62-03W pri malih signalih po postopku
![]() ,
kjer je
,
kjer je
![]() vhod,
vhod,
![]() je izhod in
je izhod in
![]() je skrbno izbrana konstanta "kolena" določene diode.
Končni rezultat se pretvori v decibele.
je skrbno izbrana konstanta "kolena" določene diode.
Končni rezultat se pretvori v decibele.
Pri uporabi kateregakoli antenskega merilnega sprejemnika moramo skrbno prilagoditi jakost vhodnega signala, da najboljše izkoristimo razpoložljivi razpon meritev. V ta namen lahko nastavljamo moč oddajnika oziroma uporabimo dodatni zunanji nastavljivi slabilec na vhodu sprejemnika.
Opisani sprejemnik je neselektiven, torej dovzeten za motnje drugih oddajnikov. Motnjam se je najbolje izogniti s pasovno-prepustnim sitom na vhodu sprejemnika. Če sita nimamo oziroma ni učinkovito, si pomagamo z višjo močjo merilnega oddajnika in dodatnim slabljenjem na vhodu merilnega sprejemnika.
5. Izvedba meritev
Smerni
diagram antene
![]() merimo v resnični radijski zvezi. Potrebujemo torej oddajnik,
sprejemnik, najmanj dve anteni in dovolj prostora! Poleg merjenca
torej potrebujemo najmanj še eno anteno za isti frekvenčni
pas in isto polarizacijo. Dodatna antena je lahko laboratorijska
referenčna antena, lahko je popolnoma enaka merjencu, lahko je
tudi nek drugi merjenec.
merimo v resnični radijski zvezi. Potrebujemo torej oddajnik,
sprejemnik, najmanj dve anteni in dovolj prostora! Poleg merjenca
torej potrebujemo najmanj še eno anteno za isti frekvenčni
pas in isto polarizacijo. Dodatna antena je lahko laboratorijska
referenčna antena, lahko je popolnoma enaka merjencu, lahko je
tudi nek drugi merjenec.
Slabljenje
radijske zveze v praznem prostoru na velikih razdaljah
![]() med oddajnikom in sprejemnikom opisuje Friisova enačba:
med oddajnikom in sprejemnikom opisuje Friisova enačba:

Radijska
zveza v praznem prostoru je recipročna. V Friisovi enačbi
nastopajo lastnosti oddajne antene
![]() in sprejemne antene
in sprejemne antene
![]() na povsem enak način. Na velikih razdaljah v povsem praznem
prostoru sprejeta moč
na povsem enak način. Na velikih razdaljah v povsem praznem
prostoru sprejeta moč
![]() upada obratno sorazmerno kvadratu razdalje.
upada obratno sorazmerno kvadratu razdalje.
Friisova
enačba postane nesmiselna na majhnih razdaljah
![]() ,
kjer napoveduje celo večjo sprejeto moč
,
kjer napoveduje celo večjo sprejeto moč
![]() od moči oddajnika! Kaj je tu narobe? Preprosta razlaga: zelo
usmerjen žaromet na majhnih razdaljah sploh ne osvetli celotnega
predmeta (sprejemnika).
od moči oddajnika! Kaj je tu narobe? Preprosta razlaga: zelo
usmerjen žaromet na majhnih razdaljah sploh ne osvetli celotnega
predmeta (sprejemnika).
Radijske antene so še bolj natančne naprave. V radijski zvezi s koherentnim sprejemom ne zadošča, da oddajnik osvetli celoten sprejemnik. Dodatno morajo imeti vsi prispevki pravilno fazo, da se sploh seštejejo v skupni rezultat na priključku koherentne sprejemne antene:
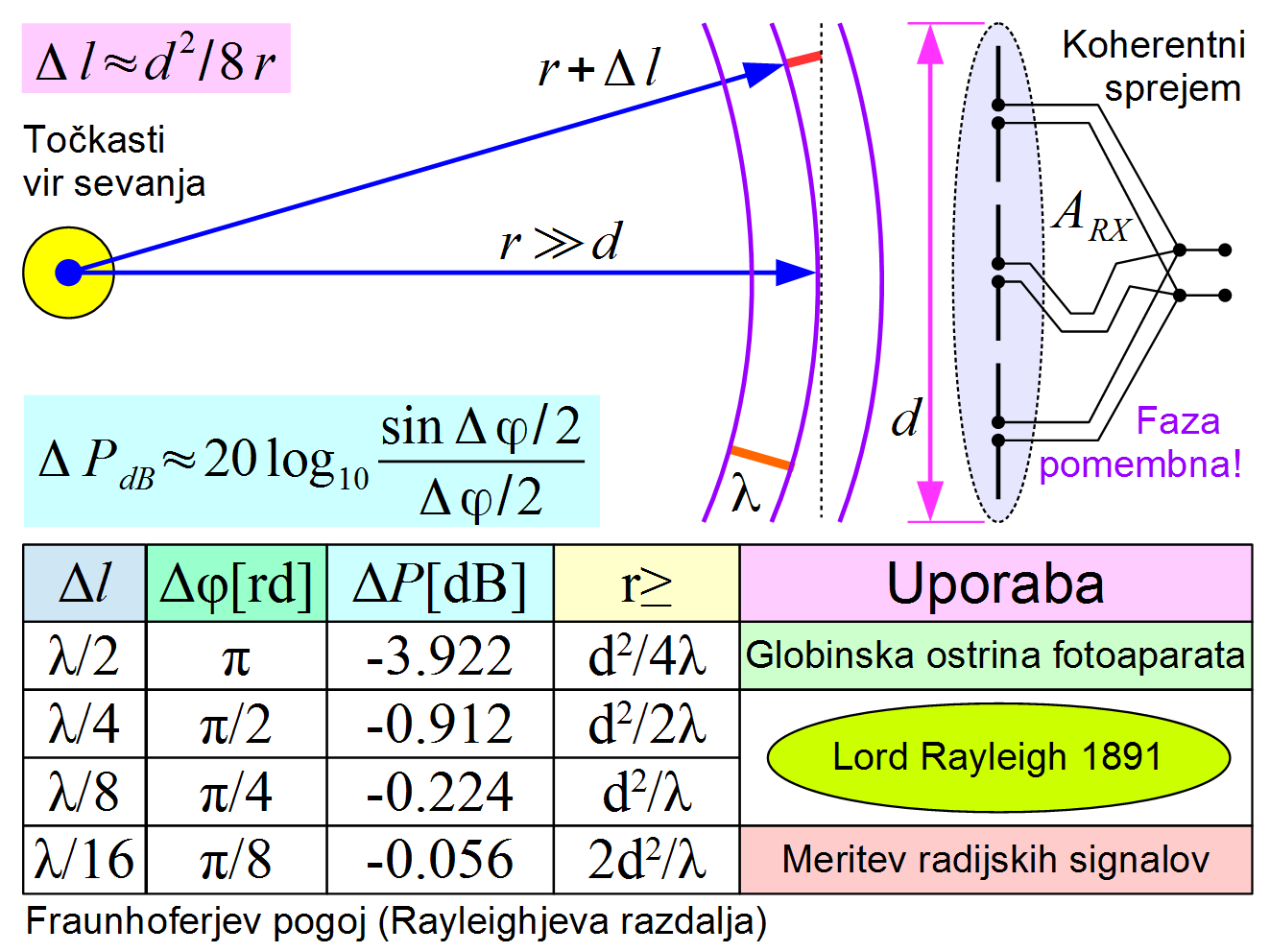
Na tem mestu je zelo smiselno primerjati radijsko anteno s fotoaparatom. Radijske antene so običajno načrtovane za dolge zveze, torej so fokusirane v neskončnost, kjer sprejemajo ravne valovne fronte. Točkasti vir sevanja oddaja krogelne valovne fronte. Ukrivljenost krogelnih valovnih front postane opazna na majhnih razdaljah, kjer prispevki na površini sprejemnika niso več sofazni.
Izgubo
ostrine fotoaparata opazimo šele pri velikih faznih napakah
okoli
![]() ,
kar vnaša izgubo signala
,
kar vnaša izgubo signala
![]() .
Lord Rayleigh je že davnega leta 1891 ugotovil, da v neskončnost
fokusiran fotoaparat ohranja ostrino vse do najmanjše
oddaljenosti predmeta
.
Lord Rayleigh je že davnega leta 1891 ugotovil, da v neskončnost
fokusiran fotoaparat ohranja ostrino vse do najmanjše
oddaljenosti predmeta
![]() .
Na primer, globinska ostrina zaslonke premera
.
Na primer, globinska ostrina zaslonke premera
![]() se pri valovni dolžini svetlobe
se pri valovni dolžini svetlobe
![]() razteza od neskončnosti vse do
razteza od neskončnosti vse do
![]() !
!
Pri
antenah uporabljamo ostrejši Fraunhoferjev pogoj
![]() ,
ki dopušča napako faze
,
ki dopušča napako faze
![]() oziroma izgubo signala
oziroma izgubo signala
![]() .
Smerni diagram antene
.
Smerni diagram antene
![]() ,
smernost
,
smernost
![]() in dobitek
in dobitek
![]() so torej definirani IZKLJUČNO na dovolj velikih razdaljah
so torej definirani IZKLJUČNO na dovolj velikih razdaljah
![]() v Fraunhoferjevem področju! Na manjših razdaljah
v Fraunhoferjevem področju! Na manjših razdaljah
![]() v Fresnelovem področju bo treba upoštevati še
geometrijsko optiko...
v Fresnelovem področju bo treba upoštevati še
geometrijsko optiko...
Smerni
diagram antene
![]() ,
smernost
,
smernost
![]() in dobitek
in dobitek
![]() vedno merimo v radijski zvezi na dovolj veliki razdalji
vedno merimo v radijski zvezi na dovolj veliki razdalji
![]() ,
ki je večja od vsote Fraunhoferjevih pogojev za prečni
izmeri oddajne antene
,
ki je večja od vsote Fraunhoferjevih pogojev za prečni
izmeri oddajne antene
![]() in sprejemne antene
in sprejemne antene
![]() .
Meritev lastnosti anten zato zahteva dovolj prostora in odsotnost
ovir:
.
Meritev lastnosti anten zato zahteva dovolj prostora in odsotnost
ovir:
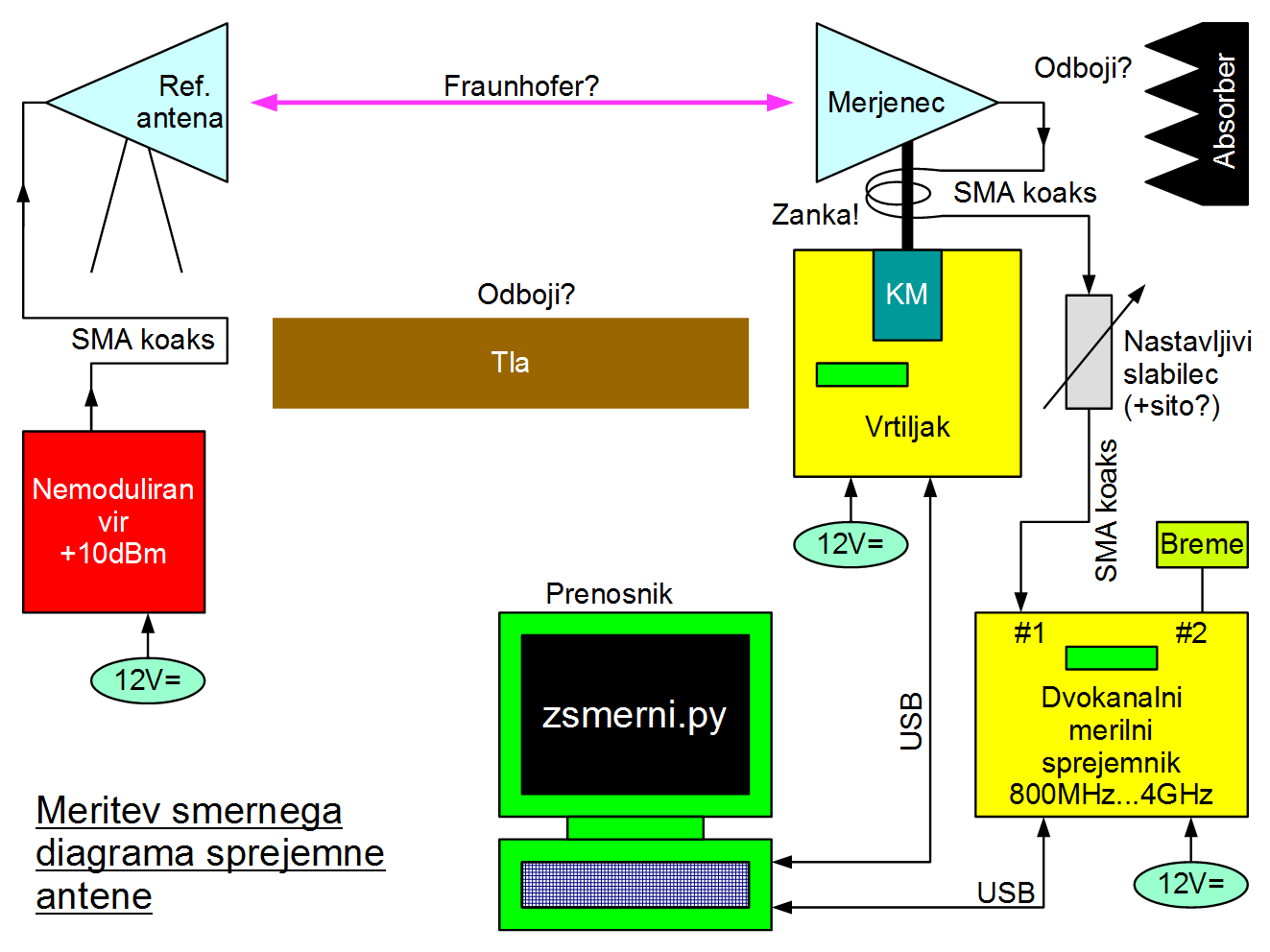
Meritev smernega diagrama antene je zato najprimernejše opraviti na prostem, na primer sredi travnika. Niti sredi travnika se ne moremo izogniti nadležnemu odboju radijskih valov od tal. Referenčno anteno zato postavimo na stojalo na določeno višino nad tlemi. Vrtiljak z merjencem postavimo na primerno visoko leseno mizico:

V izogibanju nadležnemu odboju od tal izberemo kot referenčno anteno usmerjeno anteno, ki naj čim manj seva v tla. Na tleh med antenama naj ne bo nobenih drugih ovir: predmetov, grmovja itd. Odboji so sicer najbolj nadležni od predmetov v neposredni bližini merjenca. Če teh predmetov res ne moremo odmakniti, lahko odboje zadušimo tudi s kosom absorpcijske mikrovalovne prevodne pene.
Vsi merilni pripomočki se napajajo iz enega ali več akumulatorjev 12V=. Prenosnik mora imeti živo baterijo, ki zdrži trajanje vseh naših meritev ne glede na navedbe proizvajalca računalnika! Motnjam se skušamo izogniti z izbiro primernega travnika za meritev. Nastavljivi slabilec vedno vstavimo na vhod sprejemnika, da z njim dušimo tudi motnje. Pri uporabi opisanega širokopasovnega merilnega sprejemnika proti motnjam lahko pomaga tudi dodatno pasovno sito na vhodu sprejemnika.
Žal pasovno sito nič ne pomaga tam, kjer pričakujemo motnje kar na frekvenci meritev, na primer pri mejenju anten za WiFi področje 2.4GHz. V tem primeru si pomagamo z recipročnostjo radijske zveze in zamenjamo vlogi anten. Oddajamo z merjencem in sprejemamo z referenčno anteno:
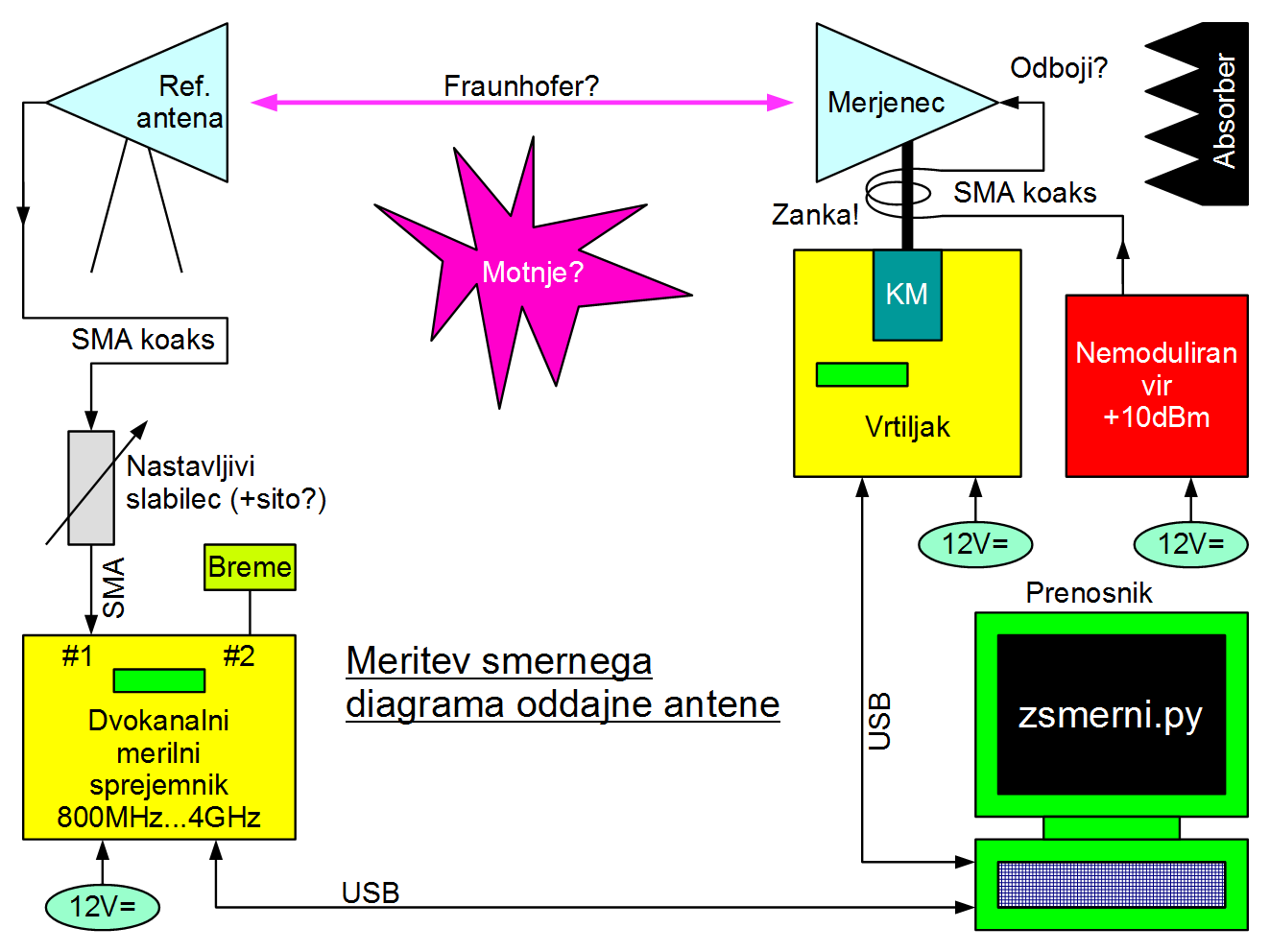
Žal niti tu ne moremo mimo zlaganega sveta sodobnega računalništva. Pregovor pravi, da ima laž kratke noge, USB pa kratek domet. V recipročni meritvi potrebujemo en USB za oddajnik in enega za sprejemnik. To pomeni vsaj en podaljšek za USB, lahko tudi dva, sicer pa primeren regenerator USB signala.
6. Krmilni program
Po nasvetu prijateljev računalnikarjev sem se odločil za krmiljenje antenskih meritev v interpreterskem jeziku Python. V groben je Python sodobna različica Basica. Kot interpreterski (skriptni) jezik je Python počasen, ampak pri meritvah anten: počasno mehansko vrtenje in neodziven USB vmesnik (ločljivost 1ms!), počasnost računanja sploh ni omejitev.
Python se obnaša enako v vseh operacijskih sistemih. Razpolaga s številnimi že izdelanimi pripomočki za risanje, vmesnike itd. Python ni licenčen, torej bo deloval tudi jutri, ko nam zmanjka denarja za plačevanje licenc. Programiranje v Pythonu je preprosto, torej dostopno vsem.
Krmilni program za antenske meritve "zsmerni.py" je napisan za različico Python2.7, ker po nasvetu računalnikarjev novejši Python3.x še ni dovolj zanesljiv. Programi, pisani za 2.7, v različicah 3.x ne delajo brez predelav, nekaj ukazov je drugačnih! "zsmerni.py" potrebuje različico Python2.7 z vgrajeno knjižnico matplotlib za risanje. V Linux je to običajno že vgrajeno. Za Windows priporočam namestitev paketa:
Anaconda2-4.1.1-Windows-x86.exe
Žal nobena različica Pythona sama po sebi ne vsebuje podpore za zaporedni vmesnik (COM port). Podporo "pyserial" je treba namestiti naknadno za pripadajočo različico Pythona, na primer v Windows:
pyserial-2.7.win32_py3k.exe
Vrtiljak kot tudi v merilni sprejemnik vsebujeta USB vmesnika s FTDI VCP (Virtual Com Port) FT231XS, ki sta povezana na UART0 mikrokrmilnikov LPC2138/01. Če pripadajoči gonilnik še ni nameščen na našem prenosniku, ga najdemo na spletni strani proizvajalca FTDI. Na spletu poiščemo tudi Termite 3.2 ter orodje FlashMagic, ki ga bomo potrebovali za programiranje mikrokrmilnikov.
Program "zsmerni.py" krmili vrtiljak in prejema podatke od različnih merilnih sprejemnikov preko dveh virtualnih RS232 vrat preko dveh USB. Pred uporabo programa "zsmerni.py" moramo najprej poiskati imena RS232 vrat (COMx v Windows, /dev/ttyUSBx v Linux) s Termite 3.2 oziroma s samim Python+pyserial v našem računalniku z ukazom:
python -m serial.tools.list_ports
Imena RS232 vrat na našem računalniku moramo nato vpisati (popraviti) takoj na začetku skripte "zsmerni.py" s preprostim urejevalnikom besedila (Notepad). Šele nato lahko poženemo izvajanje "zsmerni.py".
Tako po zagonu nas program vpraša za ime zapisa. Če ne vstavimo ničesar, program začne z novo meritvijo. Če vstavimo ime veljavnega zapisa (.CSV), ki ga je isti program ustvaril pri neki prejšnji meritvi, program iz podatkov v zapisu samo izračuna smernost in prikaže smerni diagram. Če vstavimo neobstoječe ime oziroma ime neveljavnega zapisa, se program ustavi ob napaki.
Če se odločimo za novo meritev, nas program vpraša za naslov meritve. V naslov zapišemo vsaj ime merjene antene, frekvenco meritve, ravnino prereza smernega diagrama (E ali H) ter kakšno pomembno podrobnost. Naslov mora vsebovati samo veljavne ASCII znake (omejitev Python2.7), torej samo angleška abeceda, številke in standardna interpunkcija, torej brez Jugo črk in drugih znakov UTF-8.
Po vstavljenem naslovu program začne z meritvijo. Najprej inicializira oba RS232 vmesnika FTDI VCP, kar v Windows traja kar nekaj sekund. Hkrati resetira oba mikrokrmilnika v vrtiljaku in v merilnem sprejemniku. Med meritvijo program prikazuje trenutni kot vrtiljaka in jakost sprejema. Če pri prenosu podatkov iz vrtiljaka oziroma merilnega sprejemnika pride do napake, se program ustavi.
Izmerjene podatke program zapiše v izhodni zapis z imenom <datum+ura>.CSV. V prvi vrstici zapisa sta datum in ura meritve. V drugi vrstici je naslov, kot smo ga odtipkali. Sledi 3601 vrstic izmerjenih podatkov v obliki: XXX.X YY.YY<CR><LF>, kjer je XXX.X kot v stopinjah in YY.YY jakost v dB. Izhodni zapis <datum+ura>.CSV je preprosta tekstovna datoteka, ki jo lahko urejamo s katerimkoli urejevalnikom besedila, na primer Notepad, da popravimo oziroma dopolnimo naslov in podobno. Primer:
Sat Oct 01 14:18:07 2016
VE4MA ravnina E 1420MHz
000.0 57.08
000.1 57.14
000.2 57.16
000.3 56.98
000.4 56.99
.................................................(tu vmes je še 3592 vrstic podatkov)
359.7 56.94
359.8 56.91
359.9 57.01
360.0 56.91
Po končani meritvi oziroma po branju zapisa neke prejšnje meritve program najprej izračuna odklon glavnega snopa sevanja od pričakovane vrednosti 180 stopinj ter -3dB širino glavnega snopa. Nato program zasuka tečaj svojega koordinatnega sistema v smer maksimuma in integrira smerni diagram tako, da privzame rotacijsko simetrijo okoli polarne osi. Iz rezultata integracije izračuna smernost za merjeni prerez smernega diagrama.
Natančnejšo
smernost
![]() merjene antene dobimo tako, da izmerimo vsaj dva prereza smernega
diagrama v ravninah E in H:
merjene antene dobimo tako, da izmerimo vsaj dva prereza smernega
diagrama v ravninah E in H:

Iz
obeh različnih smernosti
![]() in
in
![]() ,
zapisanih kot neimenovano razmerje v linearnih enotah (NE v
decibelih) nato izračunamo
,
zapisanih kot neimenovano razmerje v linearnih enotah (NE v
decibelih) nato izračunamo
![]() :
:
 oziroma
oziroma
Na koncu nas program vpraša za obliko izrisa smernega diagrama: kartezične ali polarne koordinate, logaritemska (40dB) ali linearna skala za jakost. Knjižnica za risanje matplotlib pri tem odpre novo okno, kar lahko traja kar nekaj dolgih sekund na počasnem računalniku. Vsebino okna lahko izvozimo v različnih oblikah: .PNG, .PDF itd.
7. Primeri meritev
Kaj
lahko v opisani antenski merilnici izmerimo in kako to storimo? Za
zaključek članka bom opisal meritve mojih anten za
radioamatersko območje
![]() .
Kot merilni izvor sem uporabil verigo množilnih stopenj, ki na svojem
izhodu proizvaja moč
.
Kot merilni izvor sem uporabil verigo množilnih stopenj, ki na svojem
izhodu proizvaja moč
![]() .
Kot referenčno anteno sem uporabil NBS 15el. Yagi, ki ima
primerno ozek snop sevanja, da se izognem odboju od tal. Referenčno
anteno sem postavil na fotografski trinožnik na višino
približno
.
Kot referenčno anteno sem uporabil NBS 15el. Yagi, ki ima
primerno ozek snop sevanja, da se izognem odboju od tal. Referenčno
anteno sem postavil na fotografski trinožnik na višino
približno
![]() nad tlemi.
nad tlemi.
Na
sprejemni strani sem najprej pomeril smerni diagram SBFA premera
![]() .
Fraunhoferjevo področje slednje začenja na
.
Fraunhoferjevo področje slednje začenja na
![]() .
Oddajna antena je sicer dolga celih
.
Oddajna antena je sicer dolga celih
![]() ,
vendar je ne vrtim! Torej v Fraunhoferjevemu pogoju upoštevam
samo njeno prečno izmero (dolžino najdaljše palčke)
,
vendar je ne vrtim! Torej v Fraunhoferjevemu pogoju upoštevam
samo njeno prečno izmero (dolžino najdaljše palčke)
![]() ,
kar daje
,
kar daje
![]() .
Razdaljo med oddajno in sprejemno anteno sem torej izbral
.
Razdaljo med oddajno in sprejemno anteno sem torej izbral
![]() .
Na tej razdalji gre odboj od tal pod dovolj strmim kotom, da je izven
glavnega snopa obeh anten.
.
Na tej razdalji gre odboj od tal pod dovolj strmim kotom, da je izven
glavnega snopa obeh anten.
Kako
izgleda izmerjeni smerni diagram antene
![]() ,
je v človeških očeh odvisno od uporabljenega merila
za jakost. Smerni diagram vsake antene izgleda zelo lep v merilu za
moč, stranskih snopov sploh nima. V linearnem merilu za
amplitudo mogoče že vidimo kakšen stranski snop. Isti
smerni diagram je v logaritemskem merilu z razponom 40dB rožica s
številnimi listi. V tako širokem razponu jakosti je
vidna še marsikatera napaka meritve vključno z
neželjenimi odboji:
,
je v človeških očeh odvisno od uporabljenega merila
za jakost. Smerni diagram vsake antene izgleda zelo lep v merilu za
moč, stranskih snopov sploh nima. V linearnem merilu za
amplitudo mogoče že vidimo kakšen stranski snop. Isti
smerni diagram je v logaritemskem merilu z razponom 40dB rožica s
številnimi listi. V tako širokem razponu jakosti je
vidna še marsikatera napaka meritve vključno z
neželjenimi odboji:
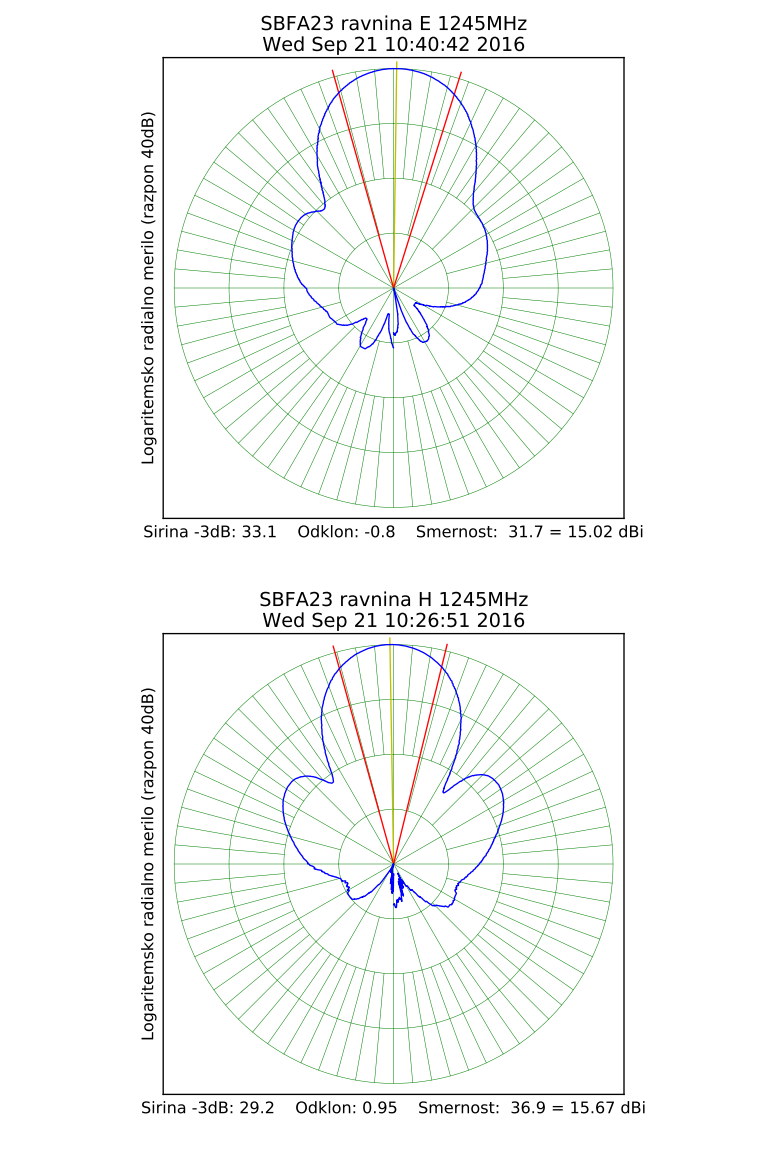
Kar
je razveseljivo, izmerjeni smerni diagram v logaritemskem merilu z
razponom 40dB je zelo podoben tistemu, kar smo pred 20 leti izmerili
na strehi FE, ko je vrtiljak Scientific Atlanta še deloval. Iz
meritev v obeh ravninah E in H je razvidno, da je SBFA odlična
usmerjena antena s smernostjo v velikostnem razredu
![]() .
.
Podobno
smernost dosega tudi zelo znana loop-Yagi antena G3JVL. Inačica
slednje za
![]() je dolga kar
je dolga kar
![]() .
Ker merjenca vrtim, moram v Fraunhoferju
.
Ker merjenca vrtim, moram v Fraunhoferju
![]() upoštevati njeno celotno dolžino, kar daje silno veliko
razdaljo! Na srečo je takšna razdalja potrebna le pri
natančni meritvi bočnih stranskih snopov. Pri meritvi
glavnega snopa je prečna izmera dolge Yagi antene dosti manjša!
upoštevati njeno celotno dolžino, kar daje silno veliko
razdaljo! Na srečo je takšna razdalja potrebna le pri
natančni meritvi bočnih stranskih snopov. Pri meritvi
glavnega snopa je prečna izmera dolge Yagi antene dosti manjša!

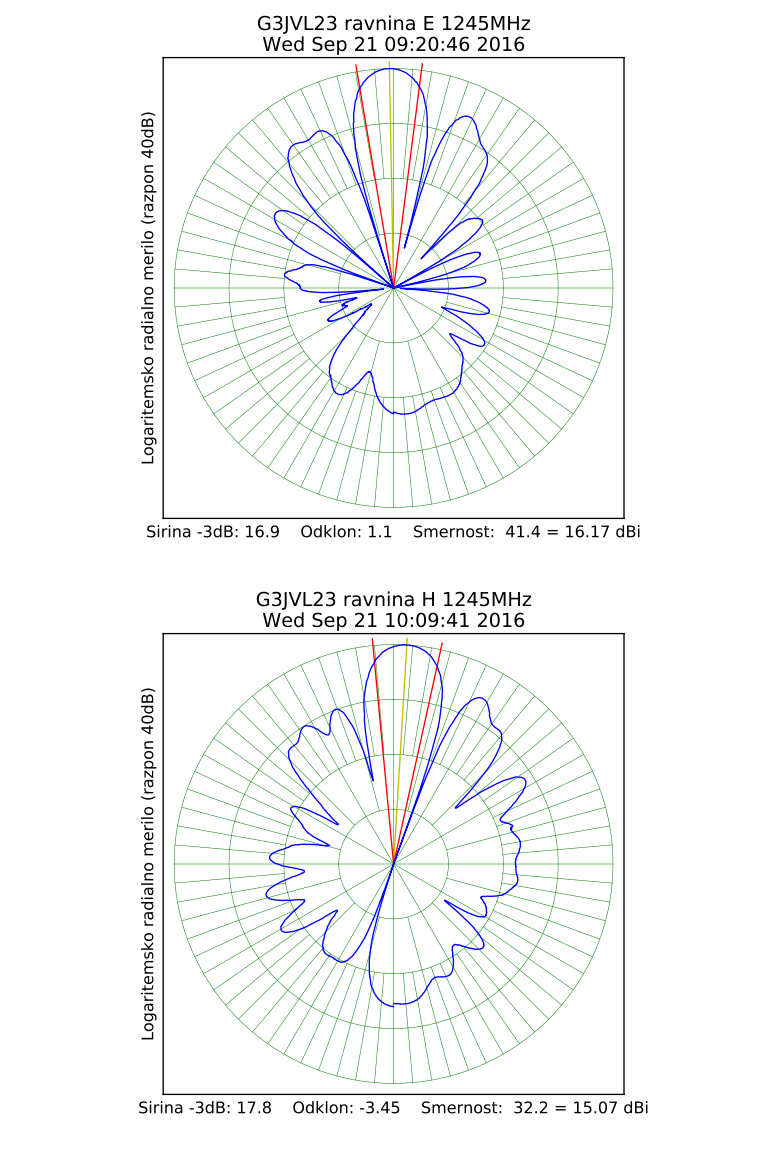
Meritev smernega diagrama G3JVL loop-Yagi, pa čeprav na premajhni razdalji, takoj pokaže značilne hibe vseh Yagi anten: množica stranskih snopov! Slednja odžira moč glavnemu snopu, ki mora biti zato ožji od snopa SBFA, da Yagi doseže podobno smernost kot SBFA.
Kljub podobni smernosti sta SBFA in G3JVL loop-Yagi precej različni anteni. Decibeli smernosti oziroma dobitka torej niti zdaleč niso edina lastnost antene. Kakršnakoli Yagi antena zahteva manj aluminija in predstavlja manjši upor za veter od SBFA in drugačnih skodelic. Žal ima za isto smernost oziroma dobitek ožji glavni snop. Številni stranski snopi varčne antene v resnični radijski zvezi pridno nabirajo šum in motnje.
Poleg SBFA in Yagi obstaja še pisana množica drugačnih anten, ki imajo vsaka svoje dobre in slabe strani. Pri izbiri antene nam lahko pomaga teorija, lahko nam pomaga dobra računalniška simulacija, ampak končni razsodnik ostaja meritev resnične izdelane antene. Resna meritev antene danes ni več nekaj nedostopnega. Če vračunamo stroške izdelave anten kot tudi celotne radijske zveze, se nam natančna meritev vseh lastnosti anten hitro povrne in obrestuje.
Izvirnik
![]() aam.odt Tiskanje
aam.odt Tiskanje
![]() aam.pdf
aam.pdf
Tiskana
vezja, podatkovni listi in programska oprema
![]() aam.zip
aam.zip
* * * * *